题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知控制系统结构如图3-54所示。 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频
已知控制系统结构如图3-54所示。
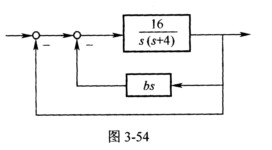 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
(1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“已知控制系统结构如图3-54所示。 (1)当b=0时,试确定…”相关的问题
更多“已知控制系统结构如图3-54所示。 (1)当b=0时,试确定…”相关的问题

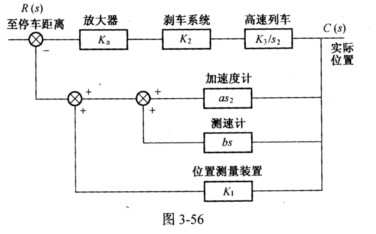 已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。
已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。 试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当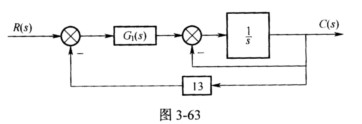 ,且r(t)=10.l(t)时,求tp、σp、ess。
,且r(t)=10.l(t)时,求tp、σp、ess。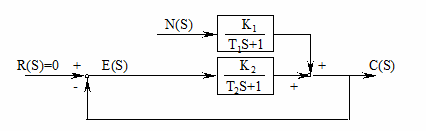

 ,校正后希望的对数幅频特性画于图6-27中,试
,校正后希望的对数幅频特性画于图6-27中,试
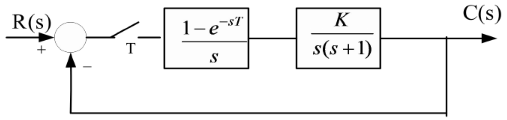
 (1)判断系统的稳定性。 (2)求系统在单位阶跃输入下的稳态误差e(∞)。
(1)判断系统的稳定性。 (2)求系统在单位阶跃输入下的稳态误差e(∞)。