题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
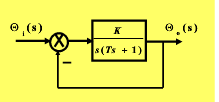
设随动系统的微分方程为: 其中,c(t)为系统输出量,r(t)为系统输入量,Tm为电动机机电时间
设随动系统的微分方程为:
 其中,c(t)为系统输出量,r(t)为系统输入量,Tm为电动机机电时间常数,Ta为电动机电磁时间常数,K为系统开环增益。初始条件全部为零,试讨论: (1)Ta,Tm与K之间关系对系统稳定性的影响; (2)当Ta=0.01,Tm=0.1,K=500时,可否忽略Ta的影响?在什么影响下Ta的影响可以忽略?
其中,c(t)为系统输出量,r(t)为系统输入量,Tm为电动机机电时间常数,Ta为电动机电磁时间常数,K为系统开环增益。初始条件全部为零,试讨论: (1)Ta,Tm与K之间关系对系统稳定性的影响; (2)当Ta=0.01,Tm=0.1,K=500时,可否忽略Ta的影响?在什么影响下Ta的影响可以忽略?
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“设随动系统的微分方程为: 其中,c(t)为系统输出量,r(t…”相关的问题
更多“设随动系统的微分方程为: 其中,c(t)为系统输出量,r(t…”相关的问题
 近似描述,其中,0<(T—τ)<1。试证系统的动态性能指标为:
近似描述,其中,0<(T—τ)<1。试证系统的动态性能指标为:
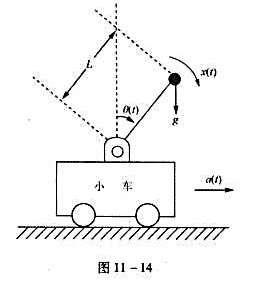
 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
 ,得到如下简化的线性方程
,得到如下简化的线性方程
 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.






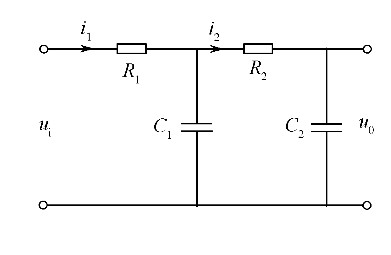
 。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
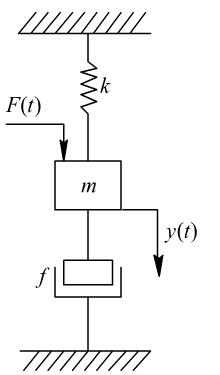
 题1.14图
题1.14图