 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
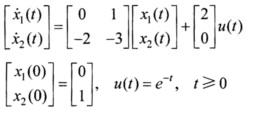
试求下述系统的状态转移矩阵φ(t)和系统状态方程的解x1(t)和x2(t):
试求下述系统的状态转移矩阵φ(t)和系统状态方程的解x1(t)和x2(t):
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
试求下述系统的状态转移矩阵φ(t)和系统状态方程的解x1(t)和x2(t):
如果结果不匹配,请 联系老师 获取答案
 更多“试求下述系统的状态转移矩阵φ(t)和系统状态方程的解x1(t…”相关的问题
更多“试求下述系统的状态转移矩阵φ(t)和系统状态方程的解x1(t…”相关的问题
已知系统的状态方程和输出方程为
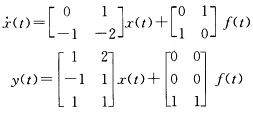 试求系统的转移函数矩阵和冲激响应矩阵。
试求系统的转移函数矩阵和冲激响应矩阵。
列写系统的状态方程和输出方程(写成矩阵形式)。
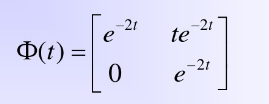
线性定常系统的齐次状态方程为
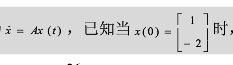
 。试求(1)系统的状态转移矩阵;(2)系统矩阵A。
。试求(1)系统的状态转移矩阵;(2)系统矩阵A。
试求下述系统在单位斜坡函数r(t)=t (t≥0)输入下的响应y(t)和误差函数e(t)。
已知状态空间描述为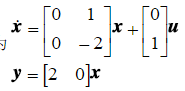
(1)判断系统的能控性和能观测性;
(2)求系统的传递函数;
(3)求系统状态转移矩阵;
(4)求该系统的特征方程。
设系统状态方程为:
 试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
试说明可否用状态反馈任意配置闭环极点,若可以,求状态反馈矩阵,使闭环极点位:j[=
 ,并画出状态变量图。
,并画出状态变量图。
证明状态转移矩阵性质:φ(-t)=φ-1(t)。 (2)证明:非奇异性变换后,线性定常系统S(A,B,C,D)的可观测性不变。
如题2.28图所示的系统,试求输入f(t)=ε(t)时,系统的零状态响应。
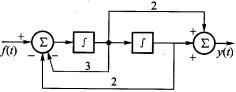 题2.28图
题2.28图







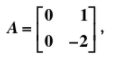 试求出其系统矩阵A。
试求出其系统矩阵A。









