题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
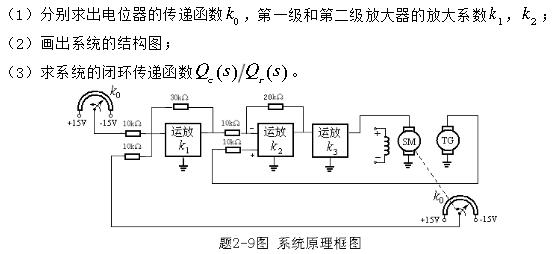
某位置随动系统原理框图如图2-66所示。 已知电位器最大工作角度Qm=3300,功率放大器放大系数为K
某位置随动系统原理框图如图2-66所示。
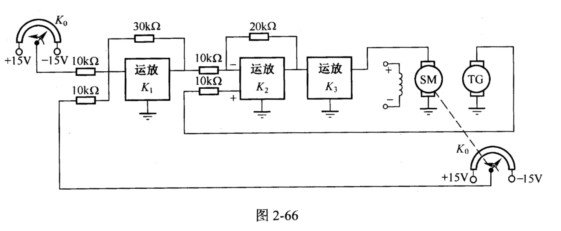 已知电位器最大工作角度Qm=3300,功率放大器放大系数为K3,试求: (1)分别求出电位器的传递函数K0,第一级和第二级放大器的放大系数K1、K2。 (2)画出系统的结构图。 (3)求系统的闭环传递函数Qc(s)/Qr(s)。
已知电位器最大工作角度Qm=3300,功率放大器放大系数为K3,试求: (1)分别求出电位器的传递函数K0,第一级和第二级放大器的放大系数K1、K2。 (2)画出系统的结构图。 (3)求系统的闭环传递函数Qc(s)/Qr(s)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某位置随动系统原理框图如图2-66所示。
已知电位器最大工作角度Qm=3300,功率放大器放大系数为K3,试求: (1)分别求出电位器的传递函数K0,第一级和第二级放大器的放大系数K1、K2。 (2)画出系统的结构图。 (3)求系统的闭环传递函数Qc(s)/Qr(s)。
如果结果不匹配,请 联系老师 获取答案
 更多“某位置随动系统原理框图如图2-66所示。 已知电位器最大工作…”相关的问题
更多“某位置随动系统原理框图如图2-66所示。 已知电位器最大工作…”相关的问题
某位置随动系统原理框图如图所示,已知电位器最大工作角度Qm=330°,功率放大器放大系数为K3。
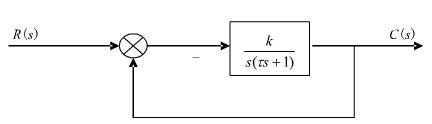
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)位置随动系统如图3-44所示。其中K(s)为控制器。
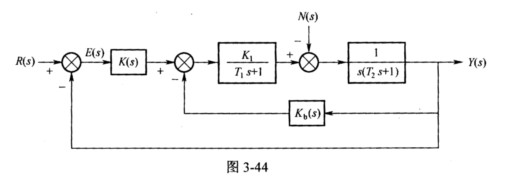 (1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)
(1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)
某LTI系统的时域框图如图(a)所示,已知f(k)=u(k),求系统的零状态响应yzs(k)。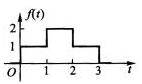
(南京理工大学2002年硕士研究生入学考试试题)某反馈控制系统的框图如图5-42(a)所示,其传递函数的频域响应曲线如图5-42(b)所示,假设系统具有最小相位传递函数。
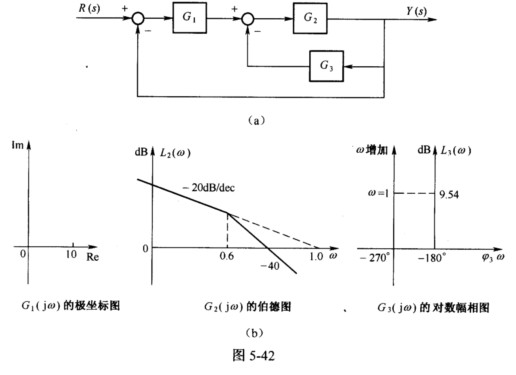 试求: (1)当G3断开时,计算系统的阻尼系数ζ。 (2)当G3闭合时,计算系统的阻尼系数ζ。
试求: (1)当G3断开时,计算系统的阻尼系数ζ。 (2)当G3闭合时,计算系统的阻尼系数ζ。
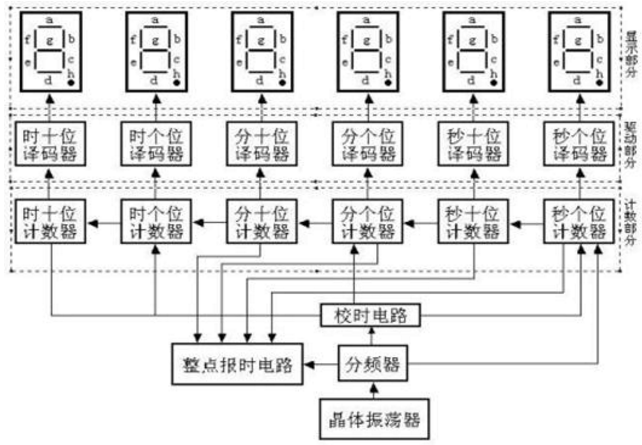
试设计一个数字电子钟,其原理框图如图9-10所示。秒信号用石英晶体振荡器(频率为32768Hz)加分频器来实现。译码显示电路将“时”、“分”、“秒”计数器的输出状态经七段显示译码器译码,通过6位LED七段显示器显示出来。整点报时电路是根据计时系统的输出状态产生一个脉冲信号,然后去触发音频发生器实现报时。校时电路是用来对“时”、“分”、“秒”显示数字进行校对调整的。
某随动系统,忽略小时间常数,采用并联校正,其简化的结构图如图5所示,其中

1)求出Wc(s)传递函数的形式与参数。
2)求出满足该指标的Kobj值。
3)画出用并联校正时的系统对数幅频特性。
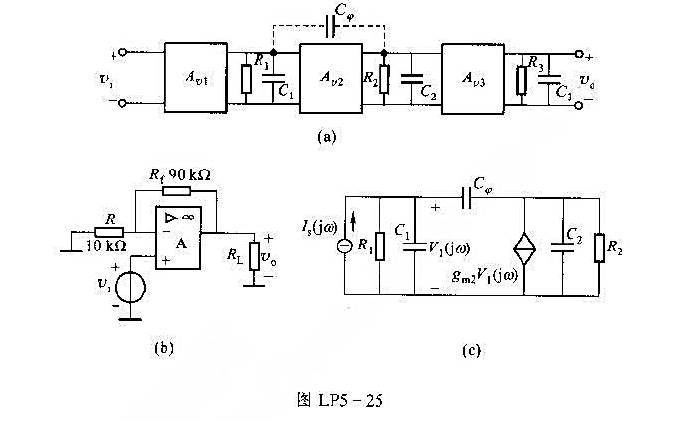
定,已知 若把它接成图LP5-25(b)所示的同相放大电路,为保证反馈放大器稳定工作,可采用简单电容补偿,亦可采用如图LP5-25(c)所示的密勒电容补偿,图中gm= 试求两种补偿时所需的电容值.设密勒补偿时
试求两种补偿时所需的电容值.设密勒补偿时 各级的输入和输出电阻对电路影响忽略不计.
各级的输入和输出电阻对电路影响忽略不计.