 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
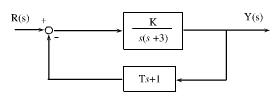
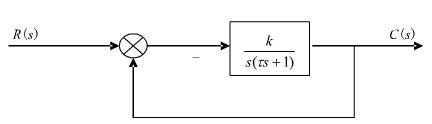
某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
如果结果不匹配,请 联系老师 获取答案
 更多“某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K…”相关的问题
更多“某控制系统如图4-19所示,其闭环极点为2±j,试确定增益K…”相关的问题
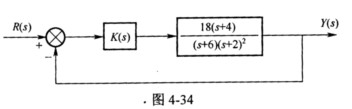
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
 。
。
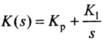 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)单位负反馈控制系统如图3-40所示。
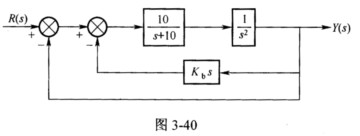 (1)试确定使系统闭环稳定的反馈系数Kb的取值范围。 (2)若已确定系统的一个闭环极点为-5,试求Kb的取值和其余的闭环极点。 (3)根据第(2)得到的系统配置,采用时域方法分析系统的瞬态性能和稳态性能。
(1)试确定使系统闭环稳定的反馈系数Kb的取值范围。 (2)若已确定系统的一个闭环极点为-5,试求Kb的取值和其余的闭环极点。 (3)根据第(2)得到的系统配置,采用时域方法分析系统的瞬态性能和稳态性能。
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图3.39所示。
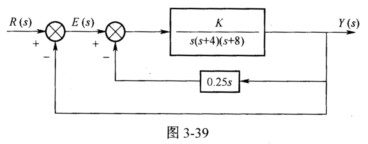 (1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。
(1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)设单位负反馈系统的根轨迹图如图4-36所示。
 (1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
(1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。
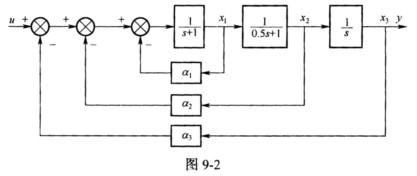 (1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
(1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
单位负反馈系统的闭环零、极点分布如图5-57所示,当参考输入为单位阶跃函数时,系统的稳定误差为零。
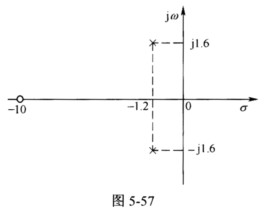 试求: (1)系统的开环传递函数。 (2)绘制系统开环对数幅频特性渐近线。 (3)幅频特性向右平移,分析系统性能有何变化。
试求: (1)系统的开环传递函数。 (2)绘制系统开环对数幅频特性渐近线。 (3)幅频特性向右平移,分析系统性能有何变化。
某减速箱由三轴组成,如图4-19(a)所示,动力由工轴输入,在Ⅰ轴上作用转矩M=697N·m。如齿轮节圆直径D1=160mm,D2=632mm,D3=204mm,齿轮压力角为20°。不计摩擦及轮、轴重量,求等速传动时,轴承A、B、C、D的约束力。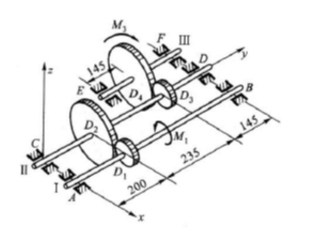
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
若图4-54所示控制系统的闭环极点为
 (即2±3.16j),试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹图;确定使系统稳定的K值范围。
(即2±3.16j),试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹图;确定使系统稳定的K值范围。


















