

 如果结果不匹配,请
如果结果不匹配,请 
 更多“调节系统的动态过渡时间 名词解释”相关的问题
更多“调节系统的动态过渡时间 名词解释”相关的问题
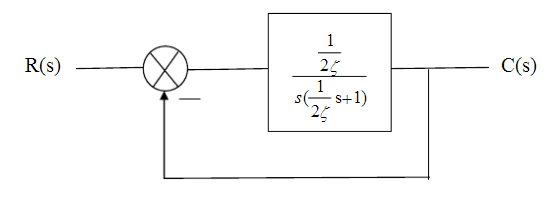
某随动系统,忽略小时间常数,采用并联校正,其简化的结构图如图5所示,其中

1)求出Wc(s)传递函数的形式与参数。
2)求出满足该指标的Kobj值。
3)画出用并联校正时的系统对数幅频特性。
线性一阶动态电路,当元件参数不变时,接通20V直流电源所用的过渡时间比接通10V直流电源所用的过渡时间要长。( )
在每次有新的装运货物到达时允许产品改变位置,以便于有效地利用仓库空间的做法被称为()。
A.动态定位系统
B.跟踪定位系统
C.固定的货位安排系统
D.自动调节系统
linux系统中,进程调度采用的技术是().
A.时间片轮转
B.先来先服务
C.静态优先数
D.动态优先数
一、二阶系统的电子模拟及阶跃响应的动态分析
一、实验目的
1.学习典型环节的电子模拟方法及在电子模拟器上建立数学模型的方法。
2.学习时域响应的测试方法,树立时域的概念。
3.明确一、二阶系统的阶跃响应及其性能域结构参数的关系。
二、实验内容
1.建立一阶系统的电子模型,观察并测量不同时间常数T的阶跃响应及性能指标调节时间ts。
2.建立二阶系统的电子模型,观察并测量不同阻尼比ξ时的阶跃响应及性能指标调节时间ts超调量δ%。
三、实验的原理与方法
1.一阶系统
微分方程(Ts+1)Uc-Ur
传递函数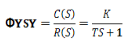
其模拟运算电路如下图所示。
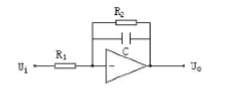
由图所示
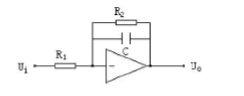 取R1=R2
取R1=R2
则K=1,Ts=R2C
选取不同的电阻值,使T分别为0.1s、0.2s、0.5s、1s时,观测并记录阶跃响应,计算调节时间ts。
2.二阶系统
传递函数
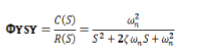
当ωn=1(rad/s)时,系统的动态结构如下图(b)所示。
 根据动态结构图画出模拟运算电路下图。
根据动态结构图画出模拟运算电路下图。

若取R2C2=1,R3C3=1
则 为观测不同阻尼比对二阶系统的影响,可以选配不同的电阻电容值使阻尼比ξ分别为0.1、0.5、0.7、1。
为观测不同阻尼比对二阶系统的影响,可以选配不同的电阻电容值使阻尼比ξ分别为0.1、0.5、0.7、1。
观察并记录响应曲线、测量H向应性能指标调节时问ts、超调量σ%。
四、实验设备及元器件
电子模拟器一台
超低频双线长余辉示波器一台
双线笔录仪一台(非必备设备)
直流稳压电源一台
三用表一台
元器件 电容 1μF 2.2μF 4.7μF 6.8μF 10μF
可变电阻 100kΩ 470kΩ
接插件导线接线柱鱼形夹等
在UML中,动态行为描述了系统随时间变化的行为。下面不属于动态行为视图的是(16)。 A.状态机视图 B.实现视图 C.交互视图 D.活动视图
















