题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
若反馈系统开环系统函数表达式为 (1)画出奈奎斯特图; (2)求使系统稳定的K值范围。 注意到本题特点是A(s
若反馈系统开环系统函数表达式为
(1)画出奈奎斯特图;
(2)求使系统稳定的K值范围。
注意到本题特点是A(s)F(s)函数的分母包含s项,也即在s平面jω轴上ω=0处有一极点,当s沿jω轴变化时需要从右侧绕过此点,为此,设置一个小半圆作为此段路径,如图所示。小半圆上的s值为s=rejθ,r为任意小的半径值,θ为辐角。当s变化沿此路径走过时,θ又

对应s沿小半圆变化,映射到A(jω)F(jω)复轨迹图上为半径等于
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“若反馈系统开环系统函数表达式为 (1)画出奈奎斯特图; (2…”相关的问题
更多“若反馈系统开环系统函数表达式为 (1)画出奈奎斯特图; (2…”相关的问题
 (1)在z平面画根轨迹图;
(1)在z平面画根轨迹图;



 ,求:
,求: 试设计串联校正装置Gc(s),使系统的Ka=10(1/s2),γ(ωc)≥35°。
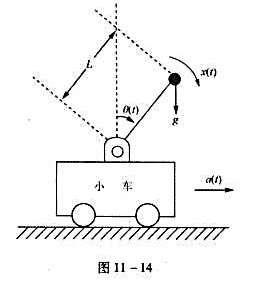
试设计串联校正装置Gc(s),使系统的Ka=10(1/s2),γ(ωc)≥35°。 应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
应等于沿此方向施加之各种加速度之和,包括重力加速度、小草加速度和扰动加速度,按此要求建立的系统动态方程如下
 ,得到如下简化的线性方程
,得到如下简化的线性方程
 表达式,并讨论系统的稳定性.
表达式,并讨论系统的稳定性.