 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
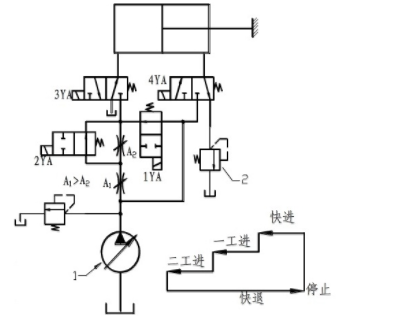
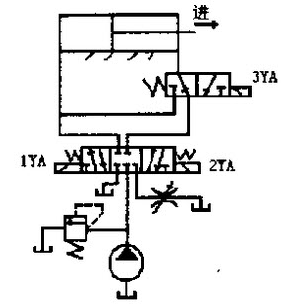
图6-49所示为实现“快进——工进(1)——工进(2)——快退——停止”的动作回路,工进(1)速度比工进(2)快,试问这些电磁阀
图6-49所示为实现“快进——工进(1)——工进(2)——快退——停止”的动作回路,工进(1)速度比工进(2)快,试问这些电磁阀应如何调度?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图6-49所示为实现“快进——工进(1)——工进(2)——快退——停止”的动作回路,工进(1)速度比工进(2)快,试问这些电磁阀应如何调度?
如果结果不匹配,请 联系老师 获取答案
 更多“图6-49所示为实现“快进——工进(1)——工进(2)——快…”相关的问题
更多“图6-49所示为实现“快进——工进(1)——工进(2)——快…”相关的问题
图8-6所示的液压系统能实现“快进→1工进→2工进→快退→停止”的工作循环。试画出电磁铁动作顺序表,并分析液压系统特点。
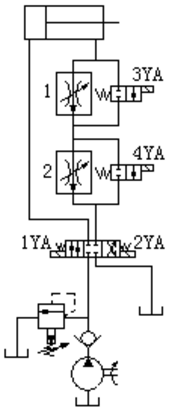
图8-5所示的液压系统能实现“快进→1工进→2工进→快退→停止”的工作循环。试画出电磁铁动作顺序表,并分析液压系统的特点。
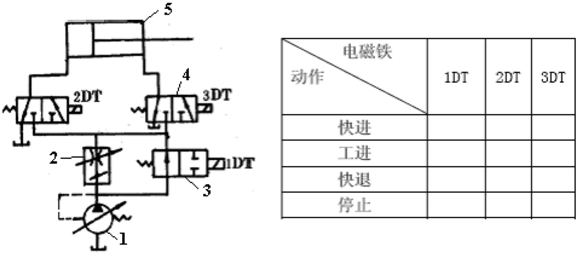
图6-51所示一实现“快进——工进——快退”动作的回路(活塞右行为“进”,左行为“退”),如设置压力继电器的目的是为了控制活塞换向,试问:图中有哪些错误?为什么是错的?应如何改正?
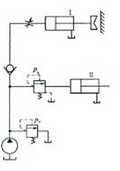
在图6-41所示的回路中,已知液压缸大、小腔面积为A1和A2,快进和工进时负载力为F1和F2(F1<F2),相应的活塞移动速度为v1和v2,若液流通过节流阀和卸荷阀时的压力损失为△pT和△pX,其他地方的阻力可忽略不计,试求:
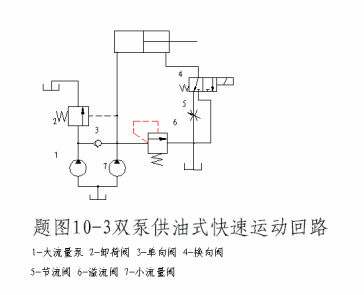
1) 溢流阀和卸荷阀的压力调整值pY和pX。
2) 大、小流量泵的输出流量qp1和qp2。
3) 快进和工进时的回路效率ηC1和ηC2。
某组合机床动力头进给运动示意图如右图所示。设动力头在初始状态时停在左边,限位开关I0.1为1状态。按下起动按钮I0.0后,Q0.0和Q0.2为1状态,动力头向有快速进给(简称快进)。碰到限位开关I0.2后变为工作进给(简称工进),仅Q0.0为1状态。碰到限位开关I0.3后,暂停5秒。5秒后Q0.2和Q0.1为1状态,工作台快速退回(简称快退),返回初始位置后停止运动。设计要求:(1)画出顺序功能图(10分);(2)用置位复位法设计梯形图程序(10分)。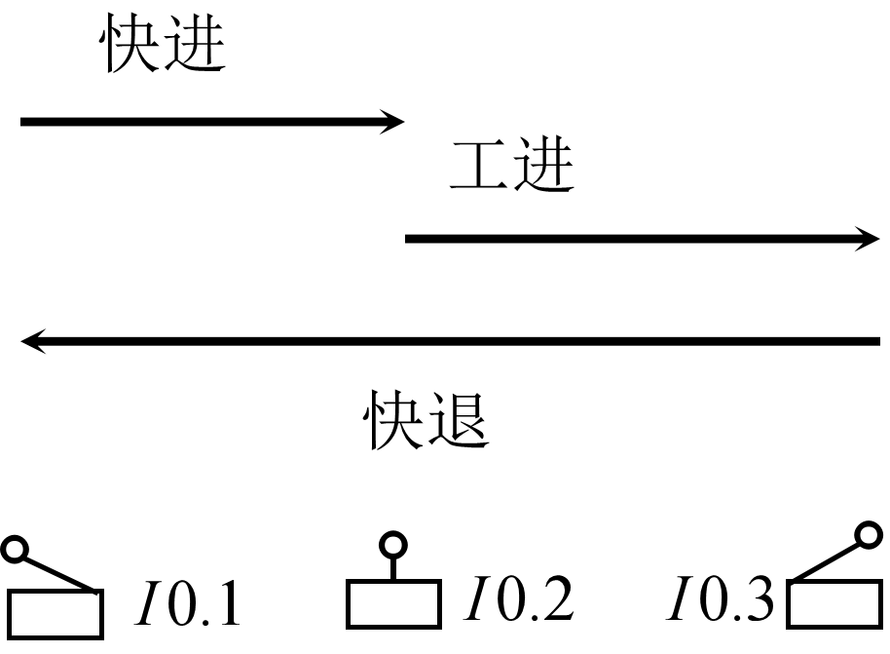
某金属加工机床液压系统如图9-3所示,分析它是如何实现工件定位、工件装夹、液压缸快进、工进(加工工件)、快退、工件松开、拔销(取下工件)动作的?相应的电磁换向阀及电磁铁是如何动作的?液压缸的工作速度是如何调节的?

名称。(2)试列出电磁铁动作表(通电“+”,失电“-”)。

如图8-4所示液压系统,完成如下动作循环:快进→工进→快退→停止、卸荷。试编写出动作循环表,并评述系统的特点。
如图7-1所示,双泵供油,差动快进—工进速度换接回路有关数据如下:液压泵的输出流量Q1=16L/min,Q2=4L/min;输送油液密度ρ=900kg/m3,运动黏度v=20×10-6m2/s,液压缸两腔面积A1=100cm2,A2=60cm2,快进时的负载F=1kN,油液流过方向阀时的压力损失△p=0.25MPa,连接液压缸两腔的油管ABCD的内径为d=1.8 cm,其中ABC段因较长(L=3m),计算时需考虑其沿程损失,其他损失及由速度、高度变化形成的影响皆可忽略。
A.平行双曲柄机构 快进 慢进
B.普通双曲柄机构 慢进 快进
C.反向双曲柄机构 快进 慢进
D.双曲柄机构 工进 工进

















