题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
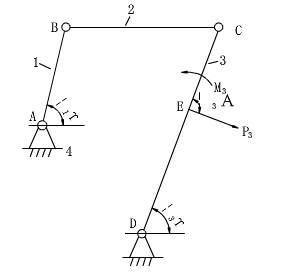
图3-6a所示的铰链四杆机构,已知构件2的质量为m2,质心在s2点,对质心s2的转动惯量为Js2,构件3的质
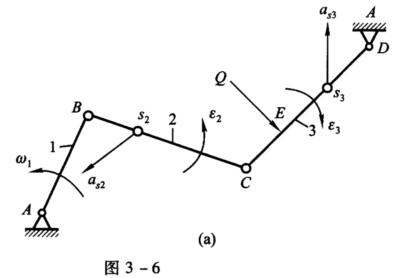
图3-6a所示的铰链四杆机构,已知构件2的质量为m2,质心在s2点,对质心s2的转动惯量为Js2,构件3的质量为m3,质心在s3点,对质心s3的转动惯量为Js3,构件3上E点作用有载荷Q,原动件1的质量、转动惯量略去不计。当原动件1以匀角速度ω1,逆时针转动时,求作用于原动件1上的平衡力矩M1。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“图3-6a所示的铰链四杆机构,已知构件2的质量为m2,质心在…”相关的问题
更多“图3-6a所示的铰链四杆机构,已知构件2的质量为m2,质心在…”相关的问题

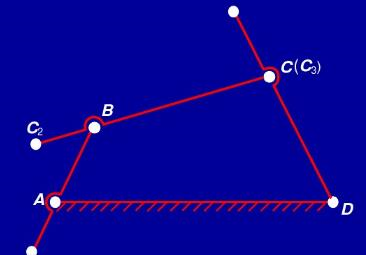
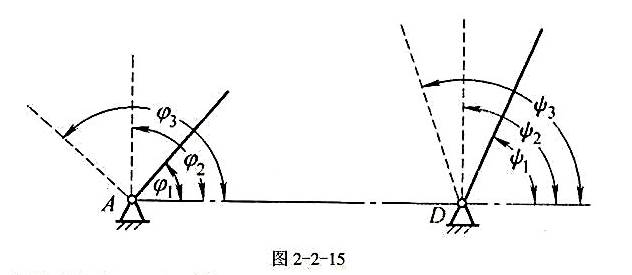
 机架长度lAD=50m,试用解析法求其余三杆长度。
机架长度lAD=50m,试用解析法求其余三杆长度。