 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
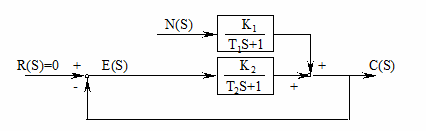
具有扰动输入n(t)的控制系统结构如下图所示,试求r(t)=1(t),n(t)=1(t)时系统的稳态误差。
具有扰动输入n(t)的控制系统结构如下图所示,试求r(t)=1(t),n(t)=1(t)时系统的稳态误差。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
具有扰动输入n(t)的控制系统结构如下图所示,试求r(t)=1(t),n(t)=1(t)时系统的稳态误差。
如果结果不匹配,请 联系老师 获取答案
 更多“具有扰动输入n(t)的控制系统结构如下图所示,试求r(t)=…”相关的问题
更多“具有扰动输入n(t)的控制系统结构如下图所示,试求r(t)=…”相关的问题
具有扰动输入n(t)的控制系统结构如图3-18所示,试求n(t)=Rn×1(t)时系统的稳态误差。
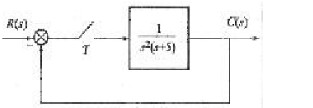
所示的某单位负反馈离散控制系统如下图所示,采样周期T=1s,输入r(t)=1(t),试求:
(1)输出z变换C(z);
(2)采样瞬时的输出响应c*(t);
(3)输出响应的终值c(∞)。
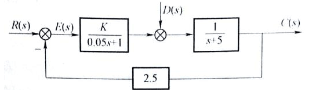
如图3-60所示的控制系统结构图,误差E(s)在输入端定义,扰动输入n(t)=2.1(t)。
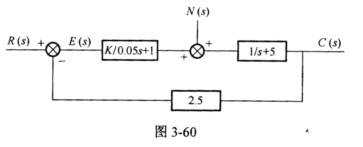 试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
试求: (1)试求K=40时,系统在扰动输入下的稳态输出和稳态误差。 (2)若K=20,其结果又如何? (3)在扰动作用点之前的前向通道中引入积分环节1/s,对其结果有什么影响?在扰动作用点之后的前向通道中引入积分环节1/s,对其结果又有什么影响?
采样系统的结构如下图所示,采样周期T=1s。
当输入信号r(t)=t时,试证明系统稳态误差为

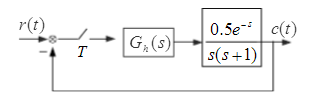
已知离散系统结构如下图所示,图中Gh(s)为零阶保持器,采样周期T=1s,分别计算输入单位阶跃和单位斜坡信号时,系统的稳态误差。
控制系统的结构如图所示,如果E(s)在输入端定义,扰动作用D(s)=2/s,分别求K=40,K=20时系统在扰动作用下的稳态输出及稳态误差。
某单位反馈系统的结构如下图所示,假设r(t)=t,n(t)=-0.5,试计算该系统的稳态误差。
二极管电路如下图所示,输入信号us(t)=Usm[1+macos(Ωt)]cos(ωct),试:

已知匹配滤波器的输入信号g(t)如下图(a)、(b)、(c),分别画出它们的冲激响应波形g(Tb-t)。

电路如下图所示,已知输入信号is(t)=Ismcos[ωct+mfsin(Ωt)],试说明is(t)、u(t)、uO(t)波形各有什么特点,指出电路所完成的功能及电路名称。

二极管电路如下图(a)、(b)所示,已知ηd≈1,图(a)输入信号ui=Uim[1+macos(Ωt)]cos(ωct),图(b)输入信号u1=U1mcos(Ωt)cos(ωct)、u2=U2mcos(ωct),U1m<U2m,试写出各电路输出电压的表达式,说明作用及名称。


















