题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
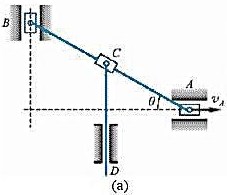
在图(a)所示的平面滑块机构中,若已知驱动力P和生产阻力Q的作用方向和作用点(设此时滑块不会发生侧倾)以及滑
在图(a)所示的平面滑块机构中,若已知驱动力P和生产阻力Q的作用方向和作用点(设此时滑块不会发生侧倾)以及滑块1的运动方向。运动副中的摩擦系数,和力Q的大小均已确定。试求驱动力P的大小,此机构所组成的机器的效率和机械自锁的条件。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图(a)所示的平面滑块机构中,若已知驱动力P和生产阻力Q的作用方向和作用点(设此时滑块不会发生侧倾)以及滑块1的运动方向。运动副中的摩擦系数,和力Q的大小均已确定。试求驱动力P的大小,此机构所组成的机器的效率和机械自锁的条件。
如果结果不匹配,请 联系老师 获取答案
 更多“在图(a)所示的平面滑块机构中,若已知驱动力P和生产阻力Q的…”相关的问题
更多“在图(a)所示的平面滑块机构中,若已知驱动力P和生产阻力Q的…”相关的问题
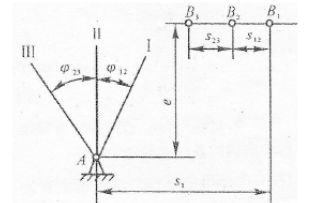
图(a)所示为某仪表中采用的摇杆滑块机构,若已知滑块和摇杆对应位置为S1=36mm,S12=8mm,S23=9mm,φ12=25°,φ23=35°,摇杆的第Ⅱ位置在铅垂方向上。滑块上铰链点取在B点,偏距e=28mm,试确定曲柄和连杆长度。
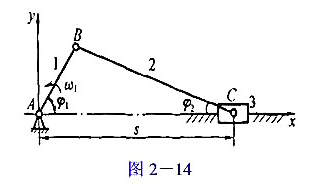
在图2-14所示曲柄滑块机构中,已知lAB=100mm,lBC=330mm,n1=1500r/min, 1=60°,试用解析法求滑块的速度和加速度.
1=60°,试用解析法求滑块的速度和加速度.
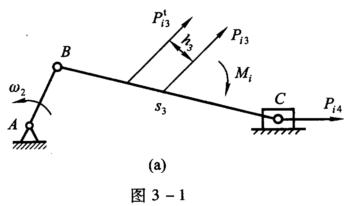
在图3-1a所示的曲柄滑块机构中,已知:曲柄和连杆的长度,连杆重心S3至曲柄销B的距离,滑块的质量m4,连杆的质量m3,连杆对通过其质心S3轴的转动惯量Js3。设曲柄以等角速度ω2逆时针回转。试求在图示位置时滑块和连杆的惯性力。
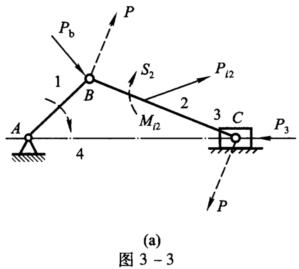
在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯性力Pi2和惯性力偶矩Mi2加于活塞上的外力P3(其中包括活塞的惯性力)。求加于曲柄销B的切向平衡力Pb或加于曲柄轴上的平衡力矩。
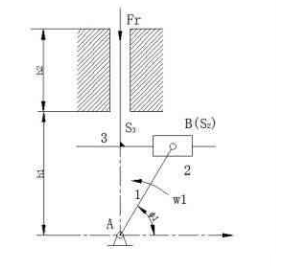
在图所示的正弦机构中,已知lAB=100mm,h1=120mm,h2=80mm,ω1=10rad/s(为常数),滑块2和构件3的重量分别为G2=40N和G3=100N,质心S2和S3的位置如图所示,加于构件3上的牛产阻力Fr=400N,构件1的重力和惯性力略去不计。试用解析法求机构在φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶矩Mb。
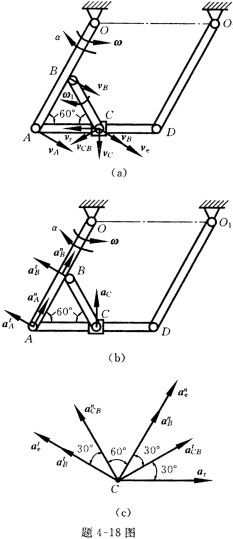
4—18图(a)所示的平行四边形铰接机构中两个曲柄OA与O1D用杆AD相连.滑块C沿着AD滑动,它通过杆BC与曲柄OA铰接。已知OB=BA=0.1m。在图示位置时,曲柄角速度ω=2rag/s角加速度a=1rad/s2,试求滑块C的速度和加速度。
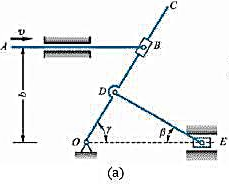
平面机构如图(a)所示。BC杆与滑块B铰接,并穿过套筒D。已知:曲柄以匀角速度ω绕O轴转动,OA=2l。在图示位置时,θ=60°,OB=BA,OA⊥AD。试求该瞬时套筒D相对于BC杆的速度。

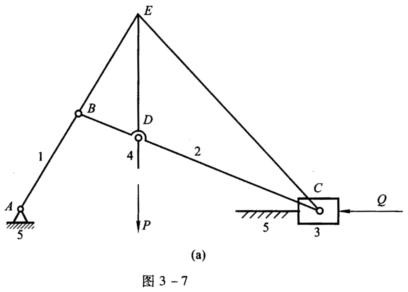
图3-7a所示曲柄滑块机构,已知其工作载荷Q作用在滑块上,而平衡力P通过构件4垂直作用于连杆2上,求图示位置时各运动副中的反力及平衡力P的大小。