如果结果不匹配,请
如果结果不匹配,请 
 更多“铰链的约束反力作用在与销钉轴线垂直的平面内,并通过销钉中心,…”相关的问题
更多“铰链的约束反力作用在与销钉轴线垂直的平面内,并通过销钉中心,…”相关的问题
第1题
平面构架由AB、BC、AD三杆用铰链连接而成,并放置在光滑的水平面上,如图所示。已知:AB=CD=a,AD=CB,3AH=AB,θ=45°
。若不计各杆件自重,试求当AB杆上受一力F作用时,铰链E处的约束反力。

第3题
关于链杆,以下说法正确的是()。
A.链杆只能限制物体上的铰结点沿垂直于链杆轴线方向的运动
B.链杆的约束反力沿着链杆中心线,表现为压力
C.链杆的约束反力沿着链杆中心线,表现为拉力
D.链杆是两端用铰链与不同的物体连接且中间不再受力(包括不计自重)的直杆
第4题
关于约束反力,下面哪种说法是不正确的()。
A.链杆的约束反力沿着链杆的轴线,可以是拉力,也可以是压力
B.柔索的约束反力沿着柔索中心线作用,只能为拉力
C.固定端支座的约束反力有三个
D.可动铰链支座的约束反力通过铰链中心方向不定,用一对正交分力表示
第7题
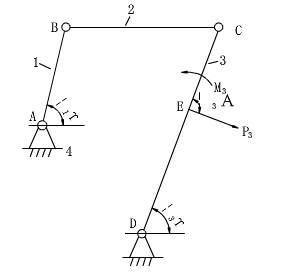
图所示铰链四杆机构中,已知lAB=80mm,lBC=lCD=320mm。当φ1=90°时,BC存水平位置,φ3=45°,F3=1000N,作用在CD的中
图所示铰链四杆机构中,已知lAB=80mm,lBC=lCD=320mm。当φ1=90°时,BC存水平位置,φ3=45°,F3=1000N,作用在CD的中点E,α3=90°,作用在构件3的力偶矩为M3=20N·m。试求各运动副中的反力以及应加于构件1的平衡力矩M。
第8题
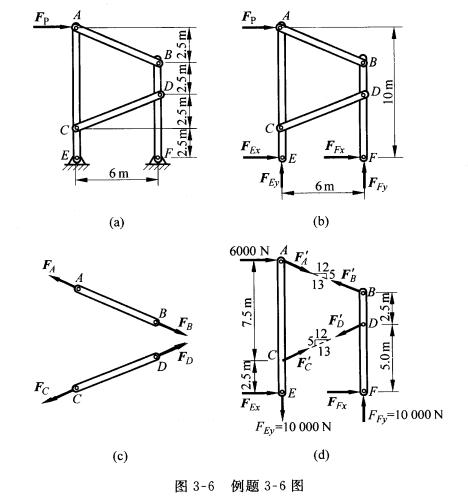
图3—6(a)所示的结构,在铰链A处加有水平力FP=6000 N,各部分尺寸示于图中。求作用在两根垂直杆上的
图3—6(a)所示的结构,在铰链A处加有水平力FP=6000 N,各部分尺寸示于图中。求作用在两根垂直杆上的力。
第10题
关于虚功的概念及虚功原理的理解中,错误的是()。
A.虚功原理的缺点是不能求约束反力
点击查看答案
B.用虚功原理求解学体系静力学的平衡问题可以使问题大简化
C.虚功原理是用动力学的概念和方法去解决力学体系静力学的平衡问题,其重要意义是当建立复杂的动力学系统的平衡条件时,不考虑约束反力,只考虑主动力
D.虚功是作用在质点上的力(包括约束反力)F在任意虚位移中做的功,对于理想约束,约束反力做的虚功为零
第11题
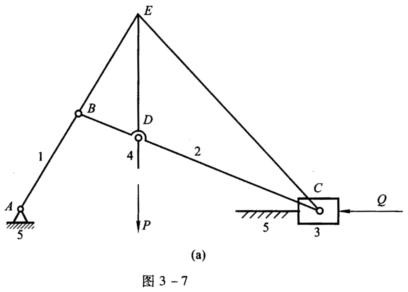
图3-7a所示曲柄滑块机构,已知其工作载荷Q作用在滑块上,而平衡力P通过构件4垂直作用于连杆2上,求
图3-7a所示曲柄滑块机构,已知其工作载荷Q作用在滑块上,而平衡力P通过构件4垂直作用于连杆2上,求图示位置时各运动副中的反力及平衡力P的大小。