

 如果结果不匹配,请
如果结果不匹配,请 
 更多“系统的开环增益是影响伺服系统的静态、动态指标的重要参数之一。…”相关的问题
更多“系统的开环增益是影响伺服系统的静态、动态指标的重要参数之一。…”相关的问题
第2题
设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为: 若要求系统最大输出速度为2r/min,输
设有单位反馈的火炮指挥仪伺服系统,其开环传递函数为:
 若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
若要求系统最大输出速度为2r/min,输出位置的容许误差小于2°,试求: (1)确定满足上述指标的最小K值,计算该K值下系统的相角裕量和幅值裕量。 (2)在前向通路中串接超前校正网络:
 计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。
计算校正后系统的相角裕量和幅值裕量,说明超前校正对系统动态性能的影响。
第4题
已知单位反馈系统的开环传递函数为,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量,
已知单位反馈系统的开环传递函数为 ,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量
,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量 ,静态速度误差系数
,静态速度误差系数 。
。
第5题
数控机床的伺服系统的开环增益为K,移动部件的运动速度为v,则跟随误差E可表示为()。 A.E=Kv C. B. D.
数控机床的伺服系统的开环增益为K,移动部件的运动速度为v,则跟随误差E可表示为( )。

第6题
已知单位反馈系统的开环传递函数为,试设计串联滞后一超前校正装 置,使校正后系统具有相位裕量γ≥40°,增益穿
已知单位反馈系统的开环传递函数为
第7题
已知单位反馈系统的开环传递函数为,试设计串联校正装置,使校正后的系统相位裕量γ≥30°,增益穿越频率ωc≥45,静
已知单位反馈系统的开环传递函数为 ,试设计串联校正装置,使校正后的系统相位裕量γ≥30°,增益穿越频率ωc≥45,静态速度误差系数Kv≥100。
,试设计串联校正装置,使校正后的系统相位裕量γ≥30°,增益穿越频率ωc≥45,静态速度误差系数Kv≥100。
第8题
已知单位反馈系统的开环传递函数为,试设计串联滞后一超前校正装置,使校正后系统具有相位裕量γ≥40°,增益穿越
已知单位反馈系统的开环传递函数为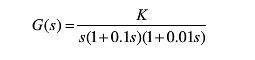 ,试设计串联滞后一超前校正装置,使校正后系统具有相位裕量γ≥40°,增益穿越频率ωc=20,静态速度误差系数Kv≥100。
,试设计串联滞后一超前校正装置,使校正后系统具有相位裕量γ≥40°,增益穿越频率ωc=20,静态速度误差系数Kv≥100。
第9题
开环进给伺服系统的数控机床,其定位精度主要取决于伺服驱动元件和机床传动机构精度、刚度和动态特性。()
开环进给伺服系统的数控机床,其定位精度主要取决于伺服驱动元件和机床传动机构精度、刚度和动态特性。( )
















