

 如果结果不匹配,请
如果结果不匹配,请 
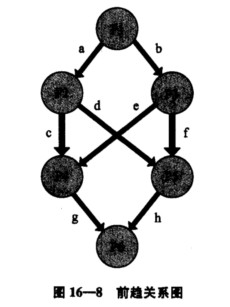
 更多“一组合作进程,执行顺序如图16—8所示。请用P、V操作实现进…”相关的问题
更多“一组合作进程,执行顺序如图16—8所示。请用P、V操作实现进…”相关的问题
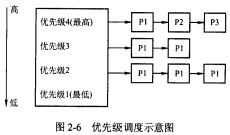
将一组进程分为4类,如图2-6所示。各类进程之间采用优先级调度算法,而各类进程的内部采用时间片轮转调度算法。请简述P1、P2、P3、P4、P5、P6、P7、P8进程的调度过程。
最早结束的作业是哪个?
如图2-11所示,三个合作进程P1、P2、P3,它们都需要通过同一设备输入各自的数据a、b、C,该输入设备必须互斥地使用,而且其第一个数据必须由P1进程读取,第二个数据必须由P2进程读取,第三个数据则必须由P3进程读取。然后,三个进程分别对输入数据进行下列计算:
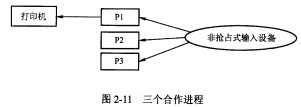 P1:x=a+b: P2:y=a*b; P3:z=y+C_a; 最后,P1进程通过所连接的打印机将计算结果x、y、z的值打印出来。请用信号量实现它们的同步。
P1:x=a+b: P2:y=a*b; P3:z=y+C_a; 最后,P1进程通过所连接的打印机将计算结果x、y、z的值打印出来。请用信号量实现它们的同步。
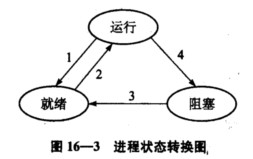
对基本的进程状态转换图(如图16—3所示)中的状态转换编号1、2、3和4,令I和J分别取值1、2、3和4(J不等于I)。请分别讨论在状态转换I和状态转换J之间是否存在因果关系。若存在,请指出这种关系是必然的,还是有条件的,条件是什么? 补充提问:分别列举能引起状态转换1、2、3、4的典型事件。
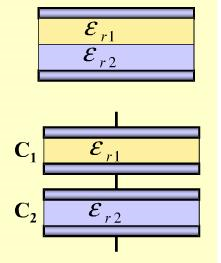
如图8—16所示,一平行板电容器面积为S,板间距离为d,板间以两层厚度相同而相对介电常数分别为εr1和εr2的电介质充满。求此电容器的电容。
铸铁制的外伸梁受力及截面尺寸如图8—16(a)所示。若已知铸铁抗拉许用应力为[σ]+=40.0 MPa,抗压许用应力为[σ]-=60.0 MPa,试 校核该梁的强度。
![铸铁制的外伸梁受力及截面尺寸如图8—16(a)所示。若已知铸铁抗拉许用应力为[σ]+=40.0 MP](https://img2.soutiyun.com/ask/uploadfile/9633001-9636000/59605c397f33f4ab630163fa3b9af557.jpg)
如图3-47所示,根据刀具轨迹,编写程序,填入程序表中。

程序表:
| N | G | X | Y | Z | I | J |
| 1 | G00 | X75.981 | Y115 | |||
| 2 | G00 | Z1 | ||||
| 3 | G01 | Z-3 | ||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| 11 | ||||||
| 12 | ||||||
| 13 | ||||||
| 14 | ||||||
| 15 | ||||||
| 16 | ||||||
| 17 | ||||||
| 18 | ||||||
| 19 | ||||||
| 20 |
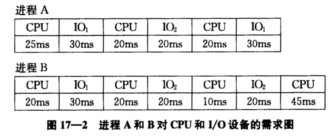 经过计算可知:()先结束。
经过计算可知:()先结束。
A.进程A
B.进程B
C.进程A和进程B同时
D.不一定
某0CL电路如图(a)所示,试回答以下问题:
(1)当UCC=15V,VT1、VT2管的饱和压降UCES≈2V,RL=8Ω时,负载RL上得到的输出功率Po应为多大?
(2)若UCC=18V,RL=16Ω,忽略VT1、VT2管上的饱和压降,当输入
(3)动态情况下测得负载RL上的电压波形uo(t)如图(b)所示,试判断这种波形失真为何种失真?应调哪个元件?如何调整可以消除失真?
(4)静态情况下,若R1、VD1、VD2三个元件中有一个开路,你认为会出现什么问题?

















