 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
观测了两个角度β1和β2,且β1>β2,但它们的中误差相等,故β1和β2两个角度的精度是相同的()
此题为判断题(对,错)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
此题为判断题(对,错)。
如果结果不匹配,请 联系老师 获取答案
 更多“观测了两个角度β1和β2,且β…”相关的问题
更多“观测了两个角度β1和β2,且β…”相关的问题
假设真实模型是 ,但你估计了
,但你估计了 。如果你利用Y在X=-3、-2、-1、0、1、2、3处的观测并估计了“不正确”的模型,这些估计值将出现什么偏误?
。如果你利用Y在X=-3、-2、-1、0、1、2、3处的观测并估计了“不正确”的模型,这些估计值将出现什么偏误?
若通过两个独立观测信道观测方差为
x1=θ+n1
x2=θ+n2
其中,nk(k=1,2)是方差为
(1)求作为x1和x2函数的估计量
(2)分别求估计量
#39;24"、42°20'23"、42°20'25",试计算:(1)该角的算术平均值;(2)观测值的中误差;(3)算术平均值的中误差。
已知系统的动态方程为:
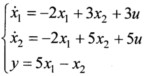 (1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。
(1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。
设f(x)在[0,π]上连续,且![设f(x)在[0,π]上连续,且,证明:在(0,π)内至少存在两个不同的点ξ1,ξ2使设f(x)在[](https://img2.soutiyun.com/ask/2020-12-09/976375505910618.png) ,证明:在(0,π)内至少存在两个不同的点ξ1,ξ2使
,证明:在(0,π)内至少存在两个不同的点ξ1,ξ2使







 有且只有两个聚点ξ1=-1和ξ2=1.
有且只有两个聚点ξ1=-1和ξ2=1.









