题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
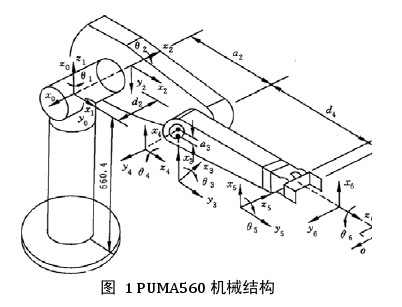
下图所示为PuMA560机器人的操作机的轴测简图,已知其结构尺寸及运动关节参数如图。试绘制该机器人操作机的机
构运动简图,并列出其操作机的运动学方程。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
构运动简图,并列出其操作机的运动学方程。
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为PuMA560机器人的操作机的轴测简图,已知其结构…”相关的问题
更多“下图所示为PuMA560机器人的操作机的轴测简图,已知其结构…”相关的问题
如下图所示为机订部件装配图,要求保证间隙,N=0.25mm,若给定尺寸

某现浇钢筋混凝土带形基础的尺寸,如下图所示
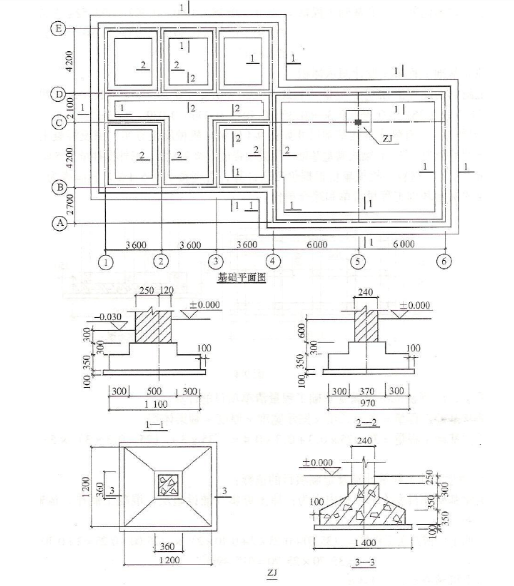 现浇钢筋混凝土独立基础的尺寸如下图所示,共3个。混凝土垫层强度等级为C15,混凝土基础强度等级为C20,场外集中搅拌,搅拌量为25m3/h,混凝土运输车运输,运距为4km。槽坑底均用电动夯实机夯实。人工、材料、机械单价根据价目表计算,管理费率为5.1%,利润率为3.2%。计算现浇钢筋混凝土带形基础、独立基础混凝土工程量和综合单价。
现浇钢筋混凝土独立基础的尺寸如下图所示,共3个。混凝土垫层强度等级为C15,混凝土基础强度等级为C20,场外集中搅拌,搅拌量为25m3/h,混凝土运输车运输,运距为4km。槽坑底均用电动夯实机夯实。人工、材料、机械单价根据价目表计算,管理费率为5.1%,利润率为3.2%。计算现浇钢筋混凝土带形基础、独立基础混凝土工程量和综合单价。
某客户机请求Web 站点服务的以太网数据帧(前 160 字节)如下图所示,则客 户机默认网关的物理地址为()。客户机在查找默认网关的物理地址时使用的协议是(),发出的数据帧中目的 MAC 地址为()。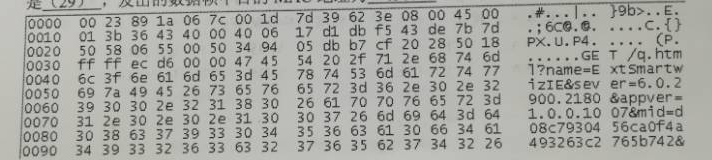
A.00-23-89-1a-06-7c B.00-ld-7d-39-62-3e C.00-00-00-00-00-00 D.ff-ff-ff-ff-ff-ff A.FTP B.ARP C.BGP D.ICMP A.00-23-89-1a-06-7c B.00-ld-7d-39-62-3e C.00-00-00-00-00-00 D.ff-ff-ff-ff-ff-ff
某机指令格式如下图所示:
 图中X为寻址特征位,且 当X=0时,不变址; x=1时,用变址寄存器X1进行变址; x=2时,用变址寄存器X2进行变址; x=3时,相对寻址。 设(PC)=1234H,[X1]=0037H,[X2]=1122H,确定下列指令的有效地址(指令和地址均用十六进制表示): (1)4420;(2)2244;(3)1322;(4)3521。
图中X为寻址特征位,且 当X=0时,不变址; x=1时,用变址寄存器X1进行变址; x=2时,用变址寄存器X2进行变址; x=3时,相对寻址。 设(PC)=1234H,[X1]=0037H,[X2]=1122H,确定下列指令的有效地址(指令和地址均用十六进制表示): (1)4420;(2)2244;(3)1322;(4)3521。
在如下图所示的Excel表中,要让A5单元格中的文字完整显示,不能实现的操作是()
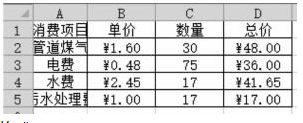
A.增加A列的列宽
B.增加第5行行高
C.将A5单元格格式设置为“自动换行”
D.双击A列与B列之间的分隔线
A.5
B.10
C.4
D.6
李明同学用Access软件为班级建立了学生信息表,部分内容如下图所示:
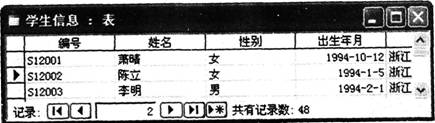
当班级中转入新的同学时,他应该对该表进行的操作是()。
A.查询记录
B.修改记录
C.添加记录
D.删除记录