 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
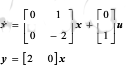
已知状态空间描述为 (1)判断系统的能控性和能观测性; (2)求系统的传递函数; (3)求系统状态转移矩阵; (4
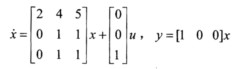
已知状态空间描述为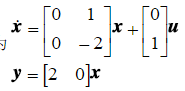
(1)判断系统的能控性和能观测性;
(2)求系统的传递函数;
(3)求系统状态转移矩阵;
(4)求该系统的特征方程。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知状态空间描述为
(1)判断系统的能控性和能观测性;
(2)求系统的传递函数;
(3)求系统状态转移矩阵;
(4)求该系统的特征方程。
如果结果不匹配,请 联系老师 获取答案
 更多“已知状态空间描述为 (1)判断系统的能控性和能观测性; (2…”相关的问题
更多“已知状态空间描述为 (1)判断系统的能控性和能观测性; (2…”相关的问题
已知某单位负反馈系统的状态空间描述为:
 (1)求该系统的传递函数。 (2)判断该系统的状态可控性、输出可控性、可观测性。 (3)求该系统的可控标准型。
(1)求该系统的传递函数。 (2)判断该系统的状态可控性、输出可控性、可观测性。 (3)求该系统的可控标准型。
已知某单位负反馈系统的状态空间描述为:
 (1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。
(1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。
已知系统的动态方程为:
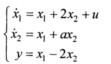 (1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
(1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
设系统微分方程为 。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
。其中,u和y分别为系统输入和输出量。试列写能控标准型(即矩阵A为友矩阵)及能观测标准型(即矩阵A为友矩阵转置)状态空间描述,并画出状态结构图。
已知系统的动态方程为:
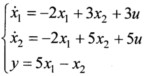 (1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。
(1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。
已知系统的状态空间表达式为
![已知系统的状态空间表达式为 ,y=[c1 c2]X 欲使系统中有一个状态既能控又能观测,另一个状](https://img2.soutiyun.com/ask/uploadfile/5358001-5361000/a8e89b679b3dbfd35edf42c40f2914d1.png)
欲使系统中有一个状态既能控又能观测,另一个状态既不能控又不能观测,试确定b1,b2和c1,c2应满足的关系。
已知系统状态空间表达式为
y=[1 0]X
当初始状态,u(t)=0时,求系统输出y(t)。







![设系统状态空间描述为 y=[0 1]x (1)画出系统的状态结构图; (2)求系统的传递函](https://img2.soutiyun.com/ask/uploadfile/5403001-5406000/9bf3955ee695a70bbc45546444a1f601.jpg)
 ,判断系统的能控性和能观测性,并求传递函数。
,判断系统的能控性和能观测性,并求传递函数。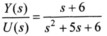 试求该系统状态空间表达式的能控标准型和可观测标准型。
试求该系统状态空间表达式的能控标准型和可观测标准型。









