 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
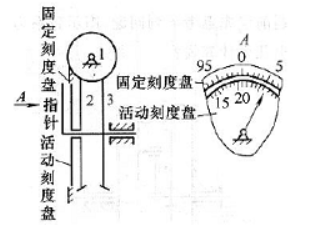
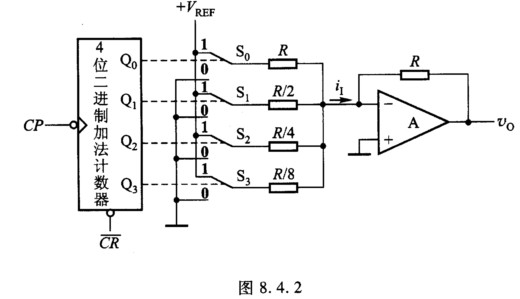
图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端装绕制线圈。2、3为两个窄蜗轮,z2
=99,Z3=100。 在计数器中有两个刻度盘,在固定刻度盘的一周上有100 个刻度,在与蜗轮2固连的活动刻度盘的一周上有99个刻度,指针与蜗轮3固连。问指针在固定刻度盘上和活动刻度盘上的每一格读数各代表绕制线圈的匝数是多少?又在图示情况下,线圈已绕制了多少匝?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端…”相关的问题
更多“图示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端…”相关的问题
如图所示为一蜗杆-斜齿圆柱齿轮-直齿圆锥齿轮三级传动,已知蜗杆为主动件,且按图示方向转动,试在图中绘出: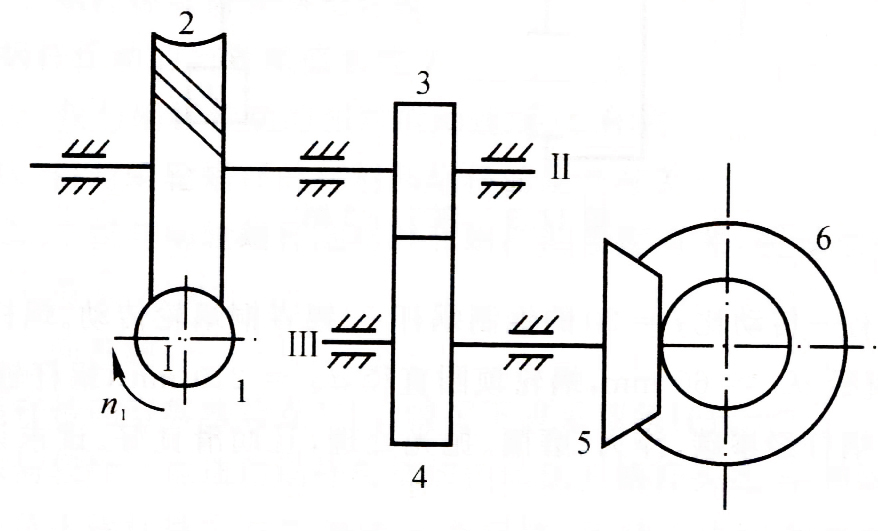 (1)各轴的转向。(8分) (2)使II,III轴上的轴向力较小时,斜齿轮的旋向。(10分) (3)轮2,4所受驻分力的方向。(12分)
(1)各轴的转向。(8分) (2)使II,III轴上的轴向力较小时,斜齿轮的旋向。(10分) (3)轮2,4所受驻分力的方向。(12分)
图(a)为曲柄冲压机机构简图。它由飞轮(和皮带轮)、曲轴(图中为曲柄臂OA)、连杆和滑块(冲头)组成。已知飞轮重W,曲轴转动力偶矩为m,半径|OA|=r。求转至图示位置(夹角α、β已知)时:1)冲压力Q与m的关系;2)轴承O的支承约束力(飞轮与曲轴固结在一起支承于轴承O。轴承O在图示平面内可视为光滑铰链)。

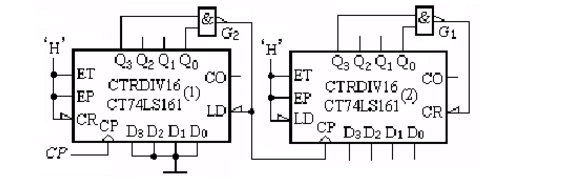
分析图中两片中规模同步计数器CT74LS161构成的计数分频器的模值。第(1)片CT74LS161为低位计数器,第(2)片CT74LS161为高位计数器。并用两片同步十进制计数器集成芯片CT74LS160采用异步复位和级间同步连接法构成模值M=85的8421BCD计数器。
图示是由两只NPN型三极管组成的复合管。假设图中两只三极管的参数为β1=100,β2=150,rbe1=700kΩ,rbe2=10kΩ,,试估算复合管总的β和rbe。

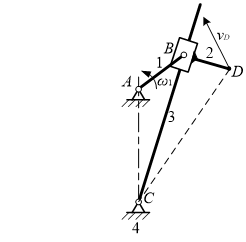
A.D点的速度方向应平行于BC方向,指向向上(图中未示出)
B.滑块2上的D点绕C点转动, 其D点的速度方向为垂直于CD连线(图中虚线),指向为逆时针方向;
C.如题图上vD所示方向
D.因缺条件,D点的速度方向无法作图确定
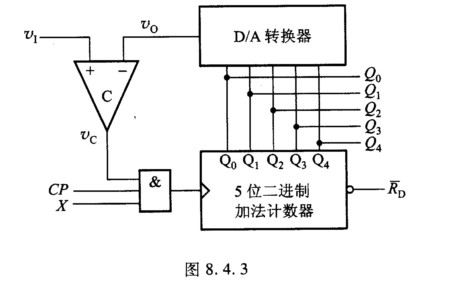 使计数器清零。已知vI>vO时,vC=1;vI≤vO时,vC=0。当vI=1.2 V时,试问: (1)输出端的二进制数Q4Q3Q2Q1Q0=? (2)转换误差为多少伏? (3)如何提高转换精度?
使计数器清零。已知vI>vO时,vC=1;vI≤vO时,vC=0。当vI=1.2 V时,试问: (1)输出端的二进制数Q4Q3Q2Q1Q0=? (2)转换误差为多少伏? (3)如何提高转换精度?


















