题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
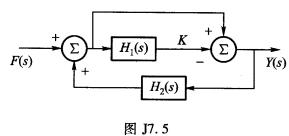
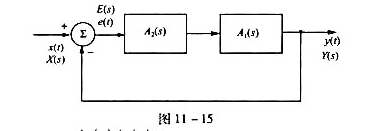
在图所示的跟踪系统中,A2(s)作为补偿器用来改善A1(s)的性能。其作用是保证系统稳定,并使误差信号e(t)=x(t)-y
在图所示的跟踪系统中,A2(s)作为补偿器用来改善A1(s)的性能。其作用是保证系统稳定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图所示的跟踪系统中,A2(s)作为补偿器用来改善A1(s)的性能。其作用是保证系统稳定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零。
如果结果不匹配,请 联系老师 获取答案
 更多“在图所示的跟踪系统中,A2(s)作为补偿器用来改善A1(s)…”相关的问题
更多“在图所示的跟踪系统中,A2(s)作为补偿器用来改善A1(s)…”相关的问题
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
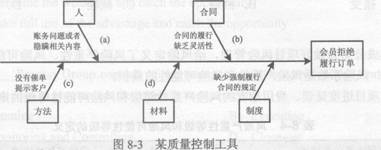 A.(a)—③,(b)—④,(c)—①,(d)—② B.(a)—④,(b)—①,(c)—②,(d)—③ C.(a)—③,(b)—①,(c)—④,(d)—② D.(a)—④,(b)—③,(c)—②,(d)—①
A.(a)—③,(b)—④,(c)—①,(d)—② B.(a)—④,(b)—①,(c)—②,(d)—③ C.(a)—③,(b)—①,(c)—④,(d)—② D.(a)—④,(b)—③,(c)—②,(d)—①
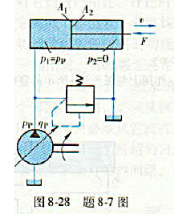
1)回路速度刚性。
2)回路效率。
3)系统效率。
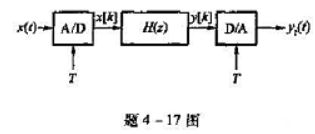
在实际中,可以通过题4-17图所示系统来实现一个模拟滤波器。
设要实现的模拟低通滤波器H(s)的指标为

(1)如果系统的抽样频率f=8kHz,试确定图中数字滤波器H(z)的设计指标,使得如图所示系统能和模拟低通滤波器H(s)等价。
(2)用双线性变换法,分别设计满足(1)中指标的BW型和CB I型的数字低通滤波器。
在图(a)所示的结构中,杆1、2、3由弹性模量为E的同一材料制成。各杆的横截面面积分别为A1=400mm2,A2=300mm2,A3=200mm2。求当荷载F=40kN时,各杆横截面上的应力。

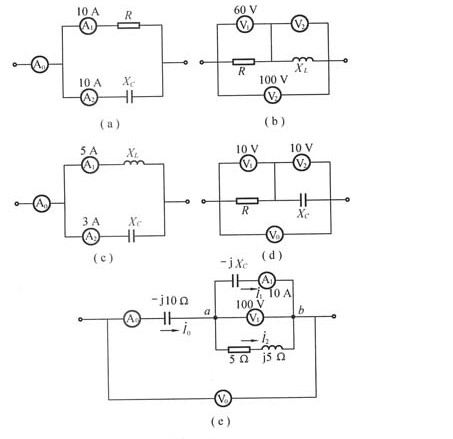
在图所示的正弦交流稳态电路中,电流表A1和A2的读数在图上都已标出(都是正弦量的有效值),则电流表A0的读数为______。
写出题5.21图所示各s域框图所描述系统的系统函数H(s)。(图(d)中e-Ts为延时T秒的延时单元的s域模型)。
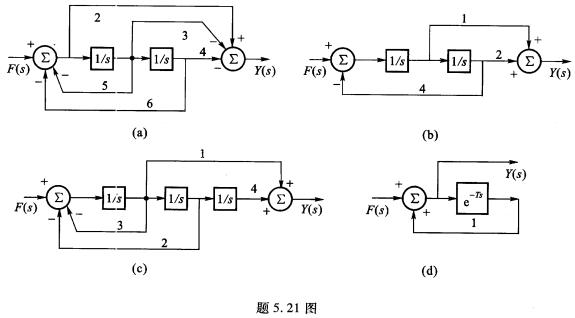
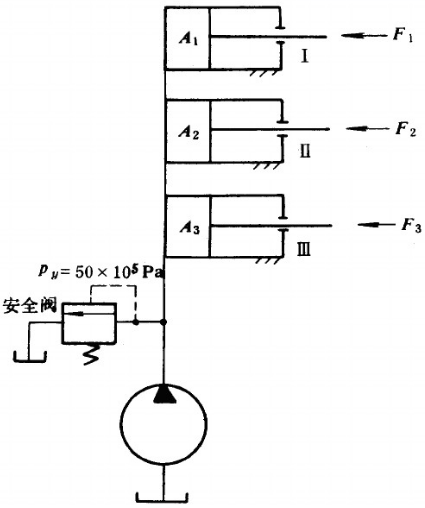
图2-3所示液压系统,液压缸活塞的面积A1=A2=A3=20×10-4m2,所受的负载F1=4000N,F2=6000N,F3=8000N,液压泵的流量为q,试分析:
1) 三个缸是怎样动作的?
2) 液压泵的工作压力有何变化?
3) 各液压缸的运动速度。
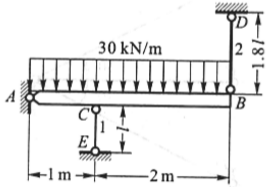
在图所示结构中,AB为刚性杆,BD和CE为钢杆。已知杆BD和CE的横截面面积分别为A1=300mm2,A2=200mm2,钢的许用应力[σ]=170MPa。若在AB上作用有均布荷载q=30kN/m,试校核杆BD和CE的强度。







 统,试确定K的取值范围。
统,试确定K的取值范围。