题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知某系统的传递函数为:。试分别给出满足以下条件的实现并分析实现的稳定性: (1)求既能控又
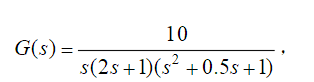
已知某系统的传递函数为:
 。试分别给出满足以下条件的实现并分析实现的稳定性: (1)求既能控又能观的约当型实现,分析该实现的渐近稳定性。 (2)求一个维数尽可能低的能控但不能观、李雅普诺夫意义下稳定但非渐近稳定的实现。分析该实现的BIBO稳定性。 (3)求一个维数尽可能低的既不能控又不能观、且李雅普诺夫意义下不稳定的实现。分析该实现的BIBO稳定性和渐近稳定性。
。试分别给出满足以下条件的实现并分析实现的稳定性: (1)求既能控又能观的约当型实现,分析该实现的渐近稳定性。 (2)求一个维数尽可能低的能控但不能观、李雅普诺夫意义下稳定但非渐近稳定的实现。分析该实现的BIBO稳定性。 (3)求一个维数尽可能低的既不能控又不能观、且李雅普诺夫意义下不稳定的实现。分析该实现的BIBO稳定性和渐近稳定性。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“已知某系统的传递函数为:。试分别给出满足以下条件的实现并分析…”相关的问题
更多“已知某系统的传递函数为:。试分别给出满足以下条件的实现并分析…”相关的问题
 其中,K>0,T1>0,T2>0。试按照T1、T2的相对取值情况,分别绘制该系统开环频率响应的极坐标图(ω为0~+∞),并应用奈奎斯特稳定判据分别判断该系统的闭环稳定性。
其中,K>0,T1>0,T2>0。试按照T1、T2的相对取值情况,分别绘制该系统开环频率响应的极坐标图(ω为0~+∞),并应用奈奎斯特稳定判据分别判断该系统的闭环稳定性。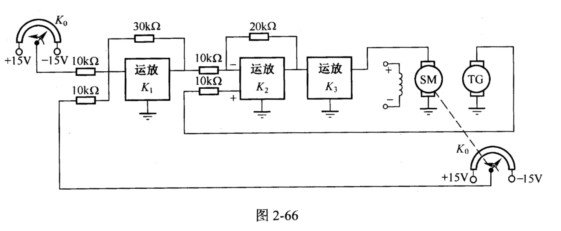 已知电位器最大工作角度Qm=3300,功率放大器放大系数为K3,试求: (1)分别求出电位器的传递函数K0,第一级和第二级放大器的放大系数K1、K2。 (2)画出系统的结构图。 (3)求系统的闭环传递函数Qc(s)/Qr(s)。
已知电位器最大工作角度Qm=3300,功率放大器放大系数为K3,试求: (1)分别求出电位器的传递函数K0,第一级和第二级放大器的放大系数K1、K2。 (2)画出系统的结构图。 (3)求系统的闭环传递函数Qc(s)/Qr(s)。 ,试分别绘制正反馈系统和负反馈系统的根轨迹图,并指出它们的稳定情况有何不同?
,试分别绘制正反馈系统和负反馈系统的根轨迹图,并指出它们的稳定情况有何不同? (1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。
(1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。 ,已知在正弦输入信号r(t)=sin 2t作用下,系统的稳态输出为
,已知在正弦输入信号r(t)=sin 2t作用下,系统的稳态输出为 ,试确定该系统单位阶跃响应的超调量与调整时间。
,试确定该系统单位阶跃响应的超调量与调整时间。 ,当输入信号r(t)=2+2t+t2时,试求系统的稳态误差。
,当输入信号r(t)=2+2t+t2时,试求系统的稳态误差。
 ,试分别计算ω=0.5和ω=2时开环频率特性的幅值A(ω)和相角φ(ω)。
,试分别计算ω=0.5和ω=2时开环频率特性的幅值A(ω)和相角φ(ω)。 ,试设计串联超前校正装置,使系统满足以下指标:
,试设计串联超前校正装置,使系统满足以下指标: