 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统的状态空间表达式为 ,y=[c1 c2]X 欲使系统中有一个状态既能控又能观测,另一个状态既不能控又不能
已知系统的状态空间表达式为
![已知系统的状态空间表达式为 ,y=[c1 c2]X 欲使系统中有一个状态既能控又能观测,另一个状](https://img2.soutiyun.com/ask/uploadfile/5358001-5361000/a8e89b679b3dbfd35edf42c40f2914d1.png)
欲使系统中有一个状态既能控又能观测,另一个状态既不能控又不能观测,试确定b1,b2和c1,c2应满足的关系。
 答案
答案


 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统的状态空间表达式为
欲使系统中有一个状态既能控又能观测,另一个状态既不能控又不能观测,试确定b1,b2和c1,c2应满足的关系。
答案
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统的状态空间表达式为 ,y=[c1 c2]X 欲使系统…”相关的问题
更多“已知系统的状态空间表达式为 ,y=[c1 c2]X 欲使系统…”相关的问题
已知系统状态空间表达式为
y=[1 0]X
当初始状态,u(t)=0时,求系统输出y(t)。
已知系统的动态结构图如图9-9所示。
 (1)列写系统的状态空间表达式。 (2)当初态x1(0)=1,x2(0)=-1,x3(0)=0,输入u是单位阶跃信号时,求状态x(t)的表达式及输出),(2)的值。
(1)列写系统的状态空间表达式。 (2)当初态x1(0)=1,x2(0)=-1,x3(0)=0,输入u是单位阶跃信号时,求状态x(t)的表达式及输出),(2)的值。
系统的状态空间表达式为
y=[1 0]X
试设计一个状态观测器,使其极点为-r,-2r(r>0)。
一个可控标准型系统的状态空间表达式为:
 同一个系统的可观测标准型的状态空间表达式为:
同一个系统的可观测标准型的状态空间表达式为:
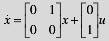
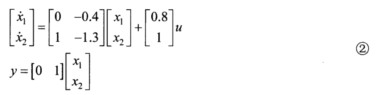
 试证明:方程①给出了一个状态可控但不是可观测的系统,方程②给出了一个不是状态完全可控却可观测的系统。并解释是什么原因引起了同一系统可控性和可观测性之间的这种显著差别。
试证明:方程①给出了一个状态可控但不是可观测的系统,方程②给出了一个不是状态完全可控却可观测的系统。并解释是什么原因引起了同一系统可控性和可观测性之间的这种显著差别。
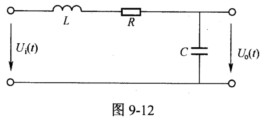
在如图9-12所示的RLC电路中,Ui(t)为输入量,Uo(t)为输出量。试列写该系统的状态空间表达式。并根据状态空间表达式,求系统的传递函数。
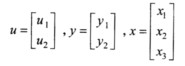
系统的动态结构如图9-8所示,试以u为输入,v为输出,x为状态变量列写系统的状态空间表达式:







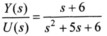
 试列写该系统的状态空间表达式。
试列写该系统的状态空间表达式。
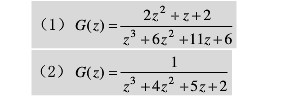
 试求该系统状态空间表达式的能控标准型和可观测标准型。
试求该系统状态空间表达式的能控标准型和可观测标准型。









