题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
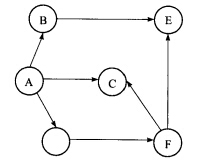
对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,F为目标节点,各节点的启发值标
对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,F为目标节点,各节点的启发值标注在小括号内)。给出搜索过程及搜索出的最佳路径,并标注各节点的估价函数值。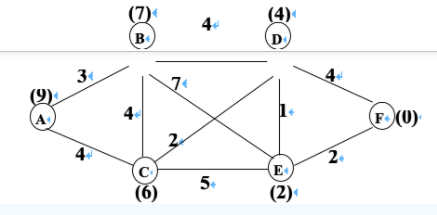
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,F为目标节点,各节点的启发值标注在小括号内)。给出搜索过程及搜索出的最佳路径,并标注各节点的估价函数值。
如果结果不匹配,请 联系老师 获取答案
 更多“对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,…”相关的问题
更多“对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,…”相关的问题
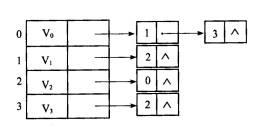
如下图所示的有向图,其深度优先搜索遍历序列为______。
A.ABEFDC
B.ABEDCF
C.ACDBEF
D.ADEFCB
A.h(x)≤h*(x)
B.h(x)≥h*(x)
C.h(x)>h*(x)
D.h(x)≠h*(x)