

 如果结果不匹配,请
如果结果不匹配,请 
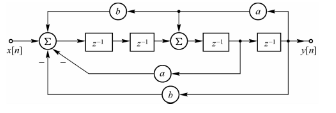
 更多“给定离散时间系统框图如图所示,列写状态方程和输出方程。”相关的问题
更多“给定离散时间系统框图如图所示,列写状态方程和输出方程。”相关的问题
第1题
对如图所示的机械若不考虑重力对系统的作用,试列写该系统以拉力f为输入,以质量块M1和M2的位移y1和y2为输出
对如图所示的机械若不考虑重力对系统的作用,试列写该系统以拉力f为输入,以质量块M1和M2的位移y1和y2为输出的状态空间表达式。

第2题
已知系统的状态方程和输出方程为 试求系统的转移函数矩阵和冲激响应矩阵。列写系统的状态方
已知系统的状态方程和输出方程为
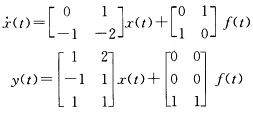 试求系统的转移函数矩阵和冲激响应矩阵。
试求系统的转移函数矩阵和冲激响应矩阵。
列写系统的状态方程和输出方程(写成矩阵形式)。

 列写状态方程和输出方程.
列写状态方程和输出方程.
第5题
(1)给定系统用微分方程描述为用图12-6的流图形式模拟该系统,列写对应于图12-6形式的状态方程,
(1)给定系统用微分方程描述为用图12-6的流图形式模拟该系统,列写对应于图12-6形式的状态方程,
点击查看答案
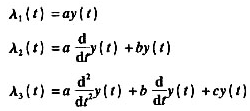
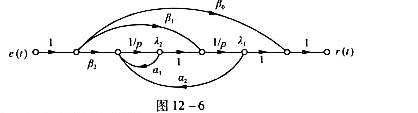
(1)给定系统用微分方程描述为

用图12-6的流图形式模拟该系统,列写对应于图12-6形式的状态方程,并求a1 与原方程系数之间的关系.
与原方程系数之间的关系.
(2)给定系统用微分方程描述为

求对应于(1)问所示状态方程的各系数.
第6题
控制系统框图如图所示,试求(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn
控制系统框图如图所示,试求(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn
点击查看答案
控制系统框图如图所示,试求
(1)当K1=25,Kf=0时,系统的阻尼系数ξ无阻尼自然振荡频率ωn以及系统对单位斜坡输入的稳态误差ess
(2)当K1=25,Kf=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,单位斜坡输入信号作用下系统的稳态误差ess=0.1,试确定K1和Kf的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽、上升时间和调整时间。

第7题
关于卡尔曼滤波算法,下列说法正确的是()。
A.卡尔曼滤波是一组线性最小均方估计的递推算法
B.卡尔曼滤波能够提供离散时间线性系统状态的线性最小均方估计
C.卡尔曼滤波在应用时需要对随机动态线性系统建立模型
D.在卡尔曼滤波算法推导中,系统扰动噪声和测量噪声都是假定为白噪声

第10题
试设计自动售货机投币控制电路。设计要求:每次只能投入一枚1分和2分的硬币,投满4分后货物送出,若有余钱也同
时找回。系统框图如图所示。其中输入量为Y、X,输出量为S、P,CP为时钟输入。设:
点击查看答案

YX=00 无输入
YX=01 1分钱的输入
YX=10 2分钱的输入
SP=00 无任何输出
SP=10 货物输出
SP=11 货物输出同时找回1分钱。
画出状态转换图,并用JK触发器实现该电路。
















