 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统微分方程组如下: x1(t)=r(t)-c(t) x3(t)=K2x2(t) x4(t)=x3(t)-x5(t)-K5c(t) 其中,τ,K1,K
已知系统微分方程组如下:
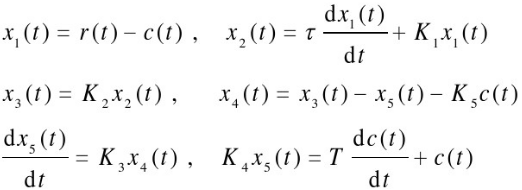
其中,τ,K1,K2,K3,K4,K5,T均为正常数。试建立r(t)对c(t)的结构图,并求系统的传递函数C(s)/R(s)。
 答案
答案

 结构图如下图所示:
结构图如下图所示:
 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统微分方程组如下:
其中,τ,K1,K2,K3,K4,K5,T均为正常数。试建立r(t)对c(t)的结构图,并求系统的传递函数C(s)/R(s)。
答案
结构图如下图所示:
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统微分方程组如下: x1(t)=r(t)-c(t) x…”相关的问题
更多“已知系统微分方程组如下: x1(t)=r(t)-c(t) x…”相关的问题
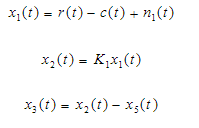
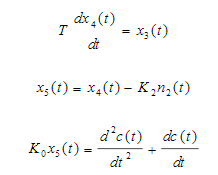 式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
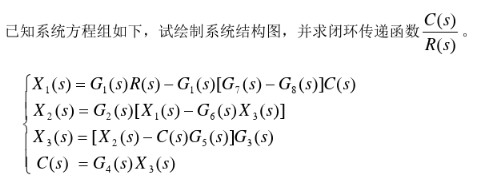
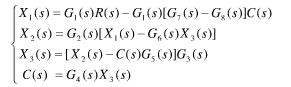
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数C(s)/R(s)。
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
设系统的微分方程式为
设系统的微分方程式为
已知单位反馈控制系统的开环传递函数如下。
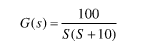
试求各系统的静态位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka,并确定当输入信号分别为r(t)=ε(t)、2t、t2和1+2t+t2时系统的稳态误差ess。







 。
。
 ,求它的通解与轨线族.
,求它的通解与轨线族.










