题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
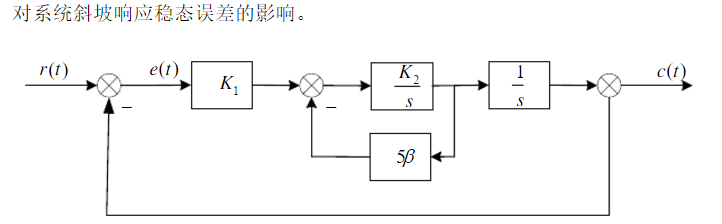
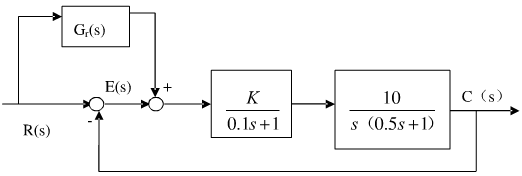
设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正装置。若Gc(s)可从KtS、KaS2和KaS2/(s+20)3种传递函
设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正装置。若Gc(s)可从KtS、KaS2和KaS2/(s+20)3种传递函数中任选一种,你选择哪一种?为什么?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正装置。若Gc(s)可从KtS、KaS2和KaS2/(s+20)3种传递函数中任选一种,你选择哪一种?为什么?
如果结果不匹配,请 联系老师 获取答案
 更多“设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正…”相关的问题
更多“设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正…”相关的问题
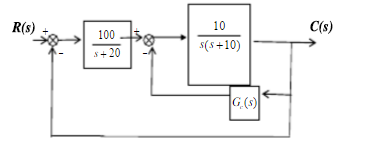
设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正后系统的静态速度误差系数Kv=200,超调量σ≤25%,调节时IM ts≤0.5s,试确定反馈校正装置

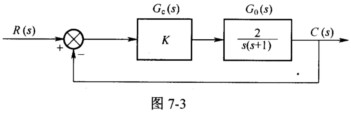
控制系统如图7-3所示,其中Gc(s)为校正环节。
 (1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
(1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
某控制系统如图3-32所示。其中控制器采用增益为Kp的比例控制器,即Gc(s)=Kp,试确定使系统稳定的Kp值范围。

设复合控制系统如图6-37所示。若要求闭环回路处于过阻尼状态,且在单位斜坡输入作用下的稳态误差为零,试确定K值及前馈补偿装置Gc(s)。
设信号s(t)是一个宽度为r,幅度为A的矩形视频脉冲,其数学表示式为
如图所示。现考虑该信号的匹配滤波问题。假定线性时不变滤波器的输入信号为
x(t)=s(t)+n(t)

其中,n(t)是均值为零、功率谱密度为
如图所示,最小相位系统的开环对数幅频曲线为L0(ω),串联校正装置对数幅频曲线为Lc(ω)。
(1) 求未校正系统开环传递函数G0(s)及串联校正装置传递函数Gc(s)。
(2) 在图中画出校正后系统的开环对数幅频曲线L(ω),并求出校正后系统的相位裕量γ。
如图所示,内装空气(或其他气体)的横截面积为S的密闭气缸,称为“空气弹簧”,常用于作精密测量的防振设备,其中质量为m的活塞(及固定于活塞的仪器等),能够沿竖直方向上下无摩擦地移动,图中y=0的位置为活塞平衡位置,设活塞在该位置时气缸内的压强为p,根据玻意耳定律p△v+v△p=0,求活塞所满足的振动方程。