题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
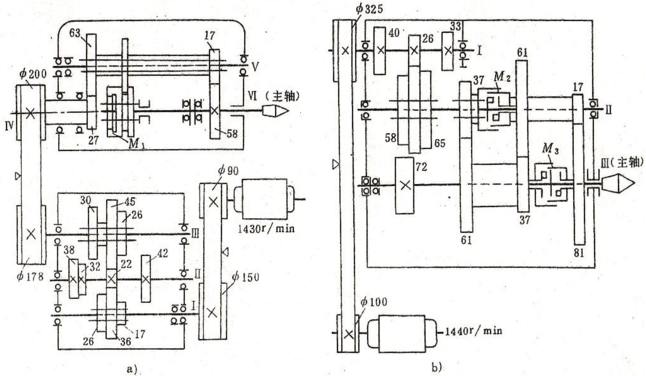
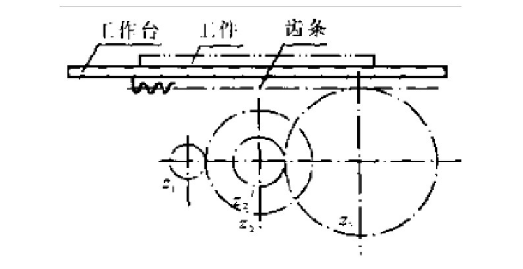
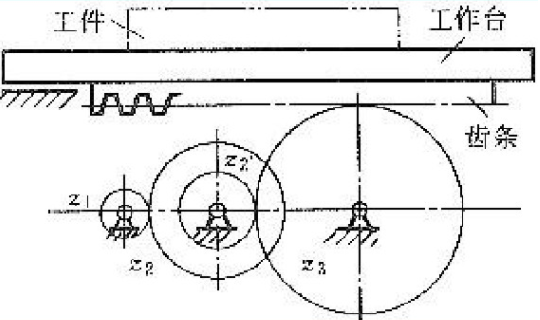
图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1、J2、J2、J3,齿
图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1、J2、J2、J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,试求该机械系统的等效转动惯量Je。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的…”相关的问题
更多“图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的…”相关的问题

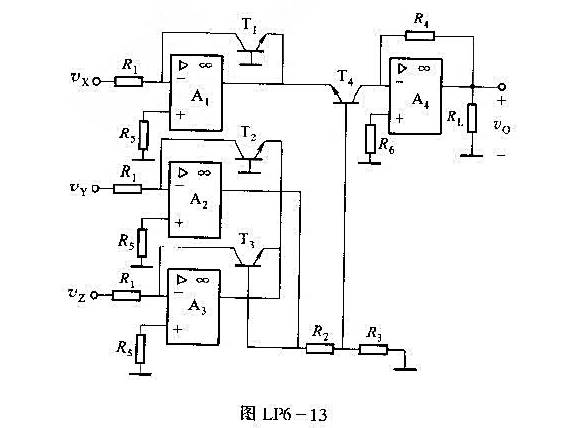
 ,设各集成运放是理想的,各晶体管特性相同.
,设各集成运放是理想的,各晶体管特性相同.