题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
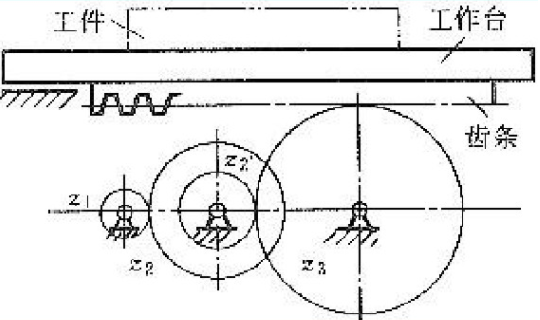
下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相反应式步进电动机,转子的齿数为80,采用三相六
拍的工作方式,丝杠螺距P=12mm,齿轮的齿数Z1=20,若要求该工作台X方向的脉冲当量δx=0.01mm,请求出被动齿轮Z2。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
拍的工作方式,丝杠螺距P=12mm,齿轮的齿数Z1=20,若要求该工作台X方向的脉冲当量δx=0.01mm,请求出被动齿轮Z2。
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相…”相关的问题
更多“下图所示为某数控工作台X方向的传动系统简图,已知电动机为三相…”相关的问题
如下图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1,J2,J2',J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,求该机械系统的等效转动惯量Je(ω1/ω2=z2/z1)。
如下图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1,J2,J2',J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,求该机械系统的等效转动惯量Je(ω1/ω2=z2/z1)。

如下图所示零件,数控车削加工该零件外圆柱面及右端面的倒角(要求按类似外圆锥加工的方法加工倒角),试编写该加工程序。

提示:工件坐标系的建立和加工刀具轨迹如下图(a)所示,A点的X值可差照图(b),得如下计算公式。
XA=D-2×(C+2)
 (2)
(2)
式中,D为圆柱体外径,C为倒角宽度值,注意与公式(1)相区别。
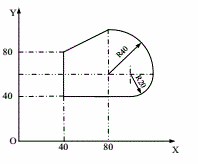
用φ10mm的立铣刀铣削工件轮廓,起刀点为(0,0),工件尺寸及加工路线如下图所示,试按相对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的X、Y、Z坐标值的地址符(主轴转速为600r/m,进给速度为150mm/min,机床具有刀具半径补偿功能)。
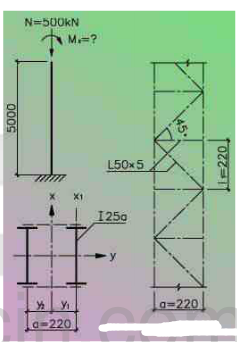
某压弯构件(Q235)在y方向的上端自由,下端固定,如下图所示。在x方向的上、下端均有不动铰支承。缀条布置见图。试按稳定条件确定该压弯构件能承受的Mx。已知:肢件截面(2I25a)几何特性:A=2×48.5=97cm2,Ix1=280cm4,Ix=12297cm4,ix=11.3cm, ,单肢ix1=2.4cm,iy1=10.18cm,缀条(
,单肢ix1=2.4cm,iy1=10.18cm,缀条( 50×5)截面积为4.803cm2。
50×5)截面积为4.803cm2。
一列沿x轴正方向传播的入射波的波动表达式为y1= ,该波在距坐标轴原点O为x0=5λ处被一垂直面反射,如下图所示,反射点为一波节。求:
,该波在距坐标轴原点O为x0=5λ处被一垂直面反射,如下图所示,反射点为一波节。求:

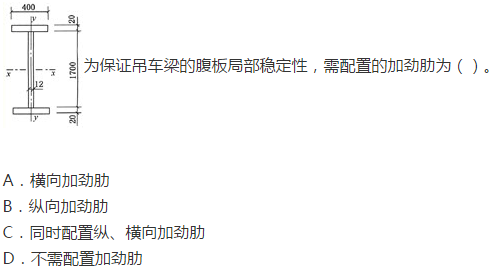
某简支吊车梁,跨度12m,钢材为0345钢,焊条为ES0系列,承受两台75/20t重级工作制桥式吊车。吊车梁截面如下图所示,Ix=1674660cm4,采用QU100钢轨,轨高15cm,与受压翼缘牢固连接。
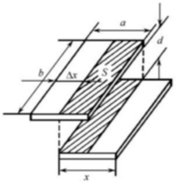
平板式电容位移传感器如下图所示。已知极板尺寸a=b=4mm,间隙d0=0.5mm,极板间介质为空气。求该传感器的静态灵敏度。若极板沿x方向移动2mm,求此时的电容量。