 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
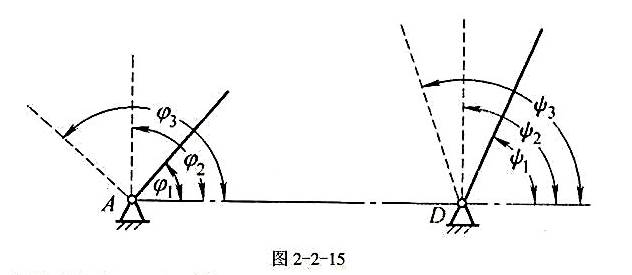
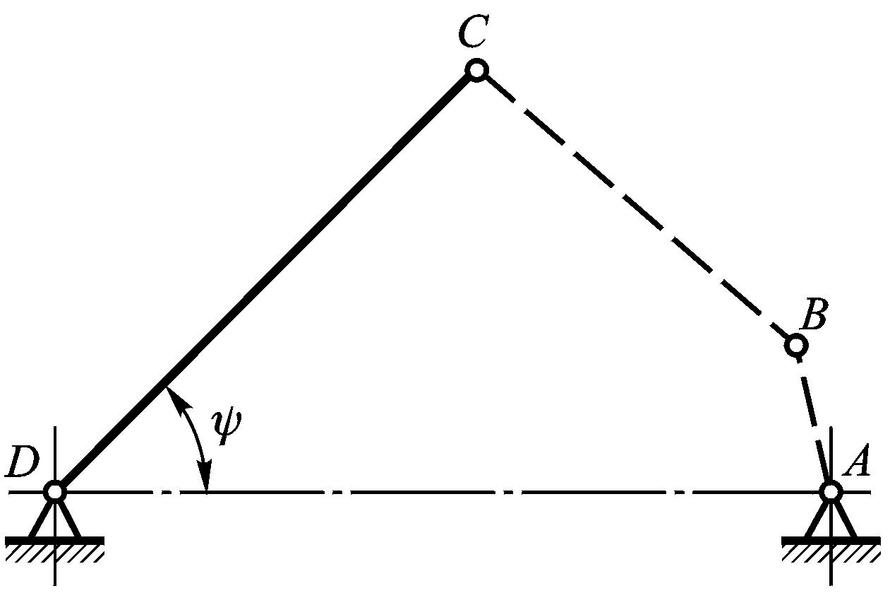
已知某操纵装置采用铰链四杆机构。要求两连杆的对应位置如图2-2-15所示,机架长度lAD=50m,
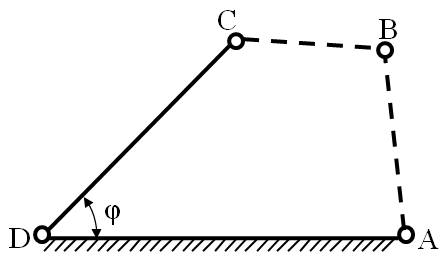
已知某操纵装置采用铰链四杆机构。要求两连杆的对应位置如图2-2-15所示, 机架长度lAD=50m,试用解析法求其余三杆长度。
机架长度lAD=50m,试用解析法求其余三杆长度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知某操纵装置采用铰链四杆机构。要求两连杆的对应位置如图2-2-15所示,机架长度lAD=50m,试用解析法求其余三杆长度。
如果结果不匹配,请 联系老师 获取答案
 更多“已知某操纵装置采用铰链四杆机构。要求两连杆的对应位置如图2-…”相关的问题
更多“已知某操纵装置采用铰链四杆机构。要求两连杆的对应位置如图2-…”相关的问题
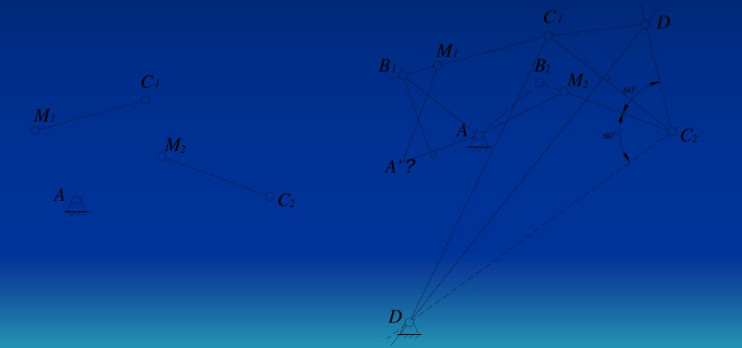
已知连杆两位置M1C1、M2C2(C为活动铰链点)及固定铰链点A,如图所示。要求活动铰连点B在MC线上,铰边C2点处压力角为30°,试设计铰链四杆机构ABCD。
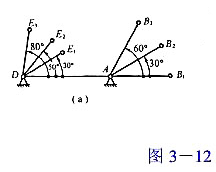
之间的转角关系如图所示.试设计此机构.
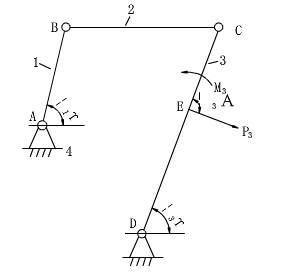
图所示铰链四杆机构中,已知lAB=80mm,lBC=lCD=320mm。当φ1=90°时,BC存水平位置,φ3=45°,F3=1000N,作用在CD的中点E,α3=90°,作用在构件3的力偶矩为M3=20N·m。试求各运动副中的反力以及应加于构件1的平衡力矩M。
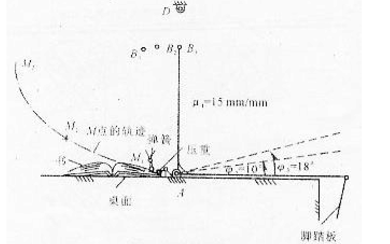
现欲设计一四杆机构翻书器。如图所示,当踩动脚踏板时,连杆上的M点自M1移至M2,就可翻过一页书。现已知固定铰链A、D的位置,连架杆AB的长度及三个位置,以及描点M的三个位置。试设计该四杆机构(压重用以保证每次翻书时只翻过一页)。
试用半角转动法,设计可实现图所示连杆两位置和一个机架位置的铰链四杆机构OABOB。要求所设计机构为曲柄摇杆机构,且当连架杆OAA主动时,在Ⅰ位置有最佳传力条件。画出机构在位置Ⅰ的运动简图,写出各杆杆长,论证所设计机构为曲柄摇杆机构。
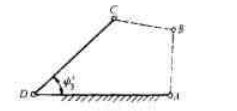
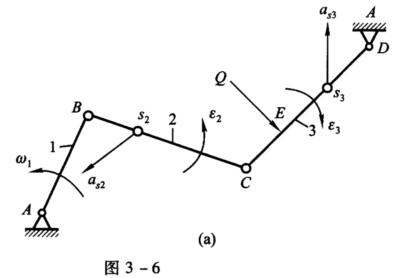
图3-6a所示的铰链四杆机构,已知构件2的质量为m2,质心在s2点,对质心s2的转动惯量为Js2,构件3的质量为m3,质心在s3点,对质心s3的转动惯量为Js3,构件3上E点作用有载荷Q,原动件1的质量、转动惯量略去不计。当原动件1以匀角速度ω1,逆时针转动时,求作用于原动件1上的平衡力矩M1。
在铰链四杆机构ABCD的设计中,已确定出连架杆AB的杆长lAB,现要求当杆AB与x轴正向φ1和φ2角时,连杆BC上一标线的角位置分别为θ1和θ2,如图(a)所示。并要求当连杆BC在第二位置时,以杆AB为主动件,机构处于最佳传力状态。试说明杆长lAD的确定方法。

A.lAB=49 mm, lBC=120 mm
B.lAB=59 mm, lBC=120 mm
C.lAB=21 mm, lBC=50 mm
D.lAB=21 mm, lBC=60 mm

















