题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
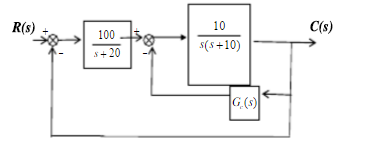
设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正后系统的静态速度误差系数Kv=200,超调量σ≤25%,调节
设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正后系统的静态速度误差系数Kv=200,超调量σ≤25%,调节时IM ts≤0.5s,试确定反馈校正装置

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正后系统的静态速度误差系数Kv=200,超调量σ≤25%,调节时IM ts≤0.5s,试确定反馈校正装置
如果结果不匹配,请 联系老师 获取答案
 更多“设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正…”相关的问题
更多“设控制系统如图所示,其中Gc(s)是反馈校正装置,若要求校正…”相关的问题
设控制系统如图所示,其中Gc(s)为改善系统性能而加入的校正装置。若Gc(s)可从KtS、KaS2和KaS2/(s+20)3种传递函数中任选一种,你选择哪一种?为什么?
已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置Gc(s)的对数幅频特性分别如图6-10(a)、(b)和(c)中L0和Lc所示。
(1)写出校正后各系统的开环传递函数;
(2)分析各Gc(s)对系统的作用,并比较其优缺点。

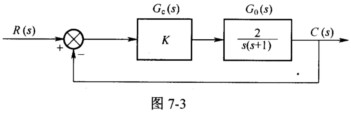
控制系统如图7-3所示,其中Gc(s)为校正环节。
 (1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
(1)若用计算机实现校正环节Gc(s),画出采样系统的方框图。 (2)若采样周期T=1s,求使采样系统稳定的K的取值范围。
某控制系统如图3-32所示。其中控制器采用增益为Kp的比例控制器,即Gc(s)=Kp,试确定使系统稳定的Kp值范围。

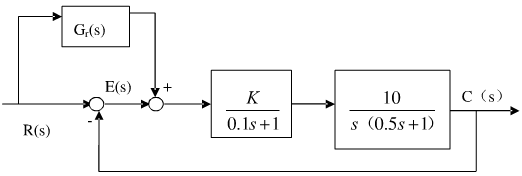
设复合控制系统如图6-37所示。若要求闭环回路处于过阻尼状态,且在单位斜坡输入作用下的稳态误差为零,试确定K值及前馈补偿装置Gc(s)。
设反馈控制系统中
 ,H(s)=1
,H(s)=1
要求:
(1)概略绘出系统根轨迹图,并判断闭环系统的稳定性。
(2)如果改变反馈通路的传递函数,使H(s)=1+2s,试判断H(s)改变后的系统稳定性,研究由于H(s)改变所产生的效应。
设反馈控制系统中,有:
 试求: (1)概略绘制系统根轨迹图,判断系统的稳定性。 (2)如果改变反馈通路传递函数使H(s)=1+2s,试判断H(s)改变后系统的稳定性,研究H(s)改变所产生的效应。
试求: (1)概略绘制系统根轨迹图,判断系统的稳定性。 (2)如果改变反馈通路传递函数使H(s)=1+2s,试判断H(s)改变后系统的稳定性,研究H(s)改变所产生的效应。
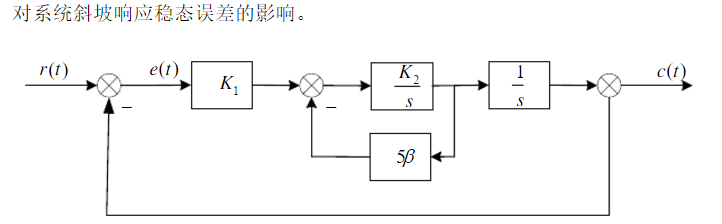
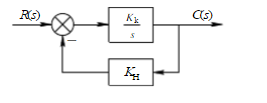
一阶系统的结构如图所示,其中KK为开环放大倍数,KH为反馈系数。设KK=100,KH=0.1,试求系统的调节时间ts(按±5%误差带)。如果要求ts=0.1s,求反馈系数。
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图所示。取
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。