题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
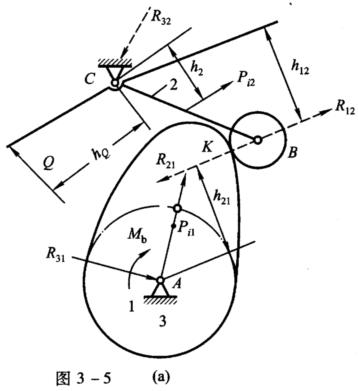
图3-5所示凸轮机构,已知各构件的尺寸,生产阻力Q,凸轮和从动杆的惯性力Pi1和Pi2。若不计滚子的惯性
图3-5所示凸轮机构,已知各构件的尺寸,生产阻力Q,凸轮和从动杆的惯性力Pi1和Pi2。若不计滚子的惯性力,求运动副中反力以及加于凸轮的平衡力矩。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图3-5所示凸轮机构,已知各构件的尺寸,生产阻力Q,凸轮和从动杆的惯性力Pi1和Pi2。若不计滚子的惯性力,求运动副中反力以及加于凸轮的平衡力矩。
如果结果不匹配,请 联系老师 获取答案
 更多“图3-5所示凸轮机构,已知各构件的尺寸,生产阻力Q,凸轮和从…”相关的问题
更多“图3-5所示凸轮机构,已知各构件的尺寸,生产阻力Q,凸轮和从…”相关的问题
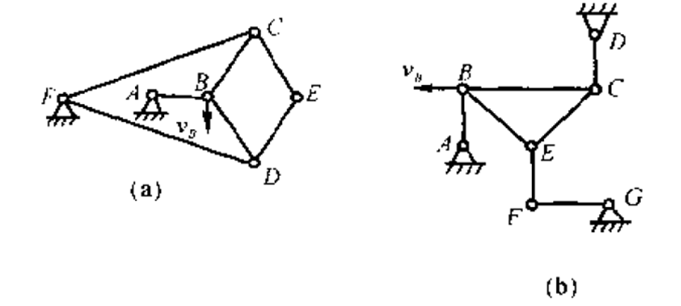
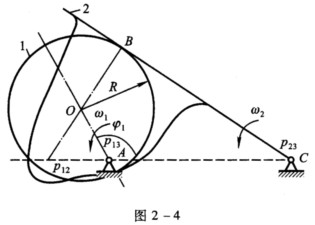
已知凸轮1以逆时针角速度ω1绕A点回转,摆杆2绕C点回转,如图2-4所示。且已知各构件尺寸,试求图示位置机构的全部瞬心以及构件2的角速度ω2。
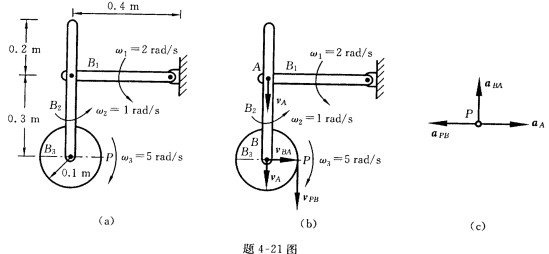
在图(a)所示机构中,已知齿轮]和2的齿数分别为z1=20,z2=40,各构件尺寸为lAB=0.1m,lAC=0.3m,lCD=0.4m,转动惯量分别为J1=0.001kg·m2,J2=0.0025kg·m2,JS4=0.02kg·m2,构件3,4的质量分别为m3=0.5kg,m4=2kg(质心在S4,![在图(a)所示机构中,已知齿轮]和2的齿数分别为z1=20,z2=40,各构件尺寸为lAB=0.1m](https://img2.soutiyun.com/latex/latex.action)
![在图(a)所示机构中,已知齿轮]和2的齿数分别为z1=20,z2=40,各构件尺寸为lAB=0.1m](https://img2.soutiyun.com/ask/5166001-5169000/cc97d1939bb822b4da1594bda7e68c86.jpg)
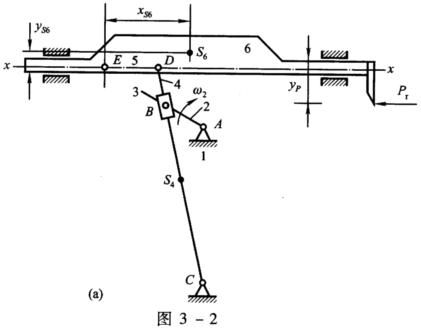
在图3-2a所示的牛头刨床机构中,已知机构的尺寸:lAC=380 mm,lAB=110 mm,lCD=540 mm,lDE=135 mm,lCS4=270 mm,xS6=240 mm,yS6=50 mm,C至刨头移动导路x - x的垂直距离为520 mm。各构件的重量:G4=200 N,G6=700 N。刨刀所受的切削阻力Pr=3500 N,它的作用位置yP=80 mm。曲柄2以n2=120 r/min顺时针匀速转动。若只考虑构件4、6的重量和构件6的惯性力,其余构件的重量和惯性力均不计。求机构在图示位置时,各运动副中的反力和应加于曲柄2上的平衡力偶矩。
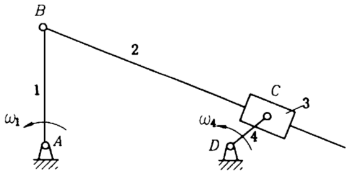
图所示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2和角加速度ε2的大小和方向。
件的质量为m1=m2=m3=1kg,各构件的质心均位于铰链间的中点,构件2对其质心轴的转动惯量Js2=0.005kg·m2,曲柄的等角速度ω1=20rad/s.当曲柄和摇杆的轴线在铅直位置而连杆的轴线在水平位置时,用质量代换法求各构件的总惯性力.

在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.
AB=25mm,lBC=127mm,lCD=76mm,lDE=50mm,φ1=30°.设ω1为顺时针方向.设作用在构件3上的总惯性力F´a=450N,lCF=20mm.其余构件上的惯性力以及各构件的重力均忽略不计.求需加于构件1上的平衡力偶矩和各运动副中的反力.
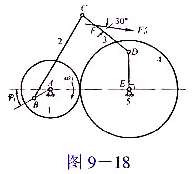
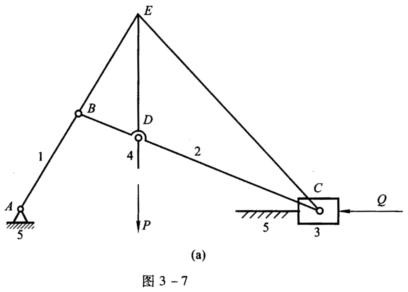
图3-7a所示曲柄滑块机构,已知其工作载荷Q作用在滑块上,而平衡力P通过构件4垂直作用于连杆2上,求图示位置时各运动副中的反力及平衡力P的大小。