题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
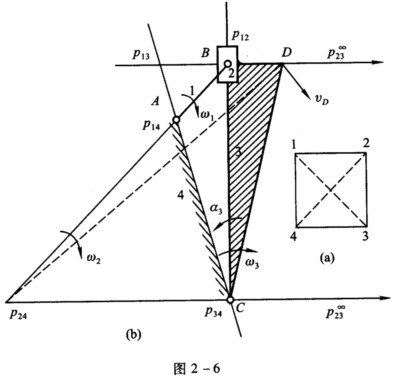
试用矢量多边形图解法求图2-6所示机构中导杆3的角速度ω3、角加速度α3,以及滑块2上D点的速度vD2和
试用矢量多边形图解法求图2-6所示机构中导杆3的角速度ω3、角加速度α3,以及滑块2上D点的速度vD2和导杆3上D点的速度vD3与加速度aD2、aD3。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
试用矢量多边形图解法求图2-6所示机构中导杆3的角速度ω3、角加速度α3,以及滑块2上D点的速度vD2和导杆3上D点的速度vD3与加速度aD2、aD3。
如果结果不匹配,请 联系老师 获取答案
 更多“试用矢量多边形图解法求图2-6所示机构中导杆3的角速度ω3、…”相关的问题
更多“试用矢量多边形图解法求图2-6所示机构中导杆3的角速度ω3、…”相关的问题
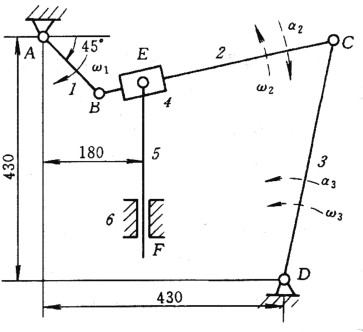
图所示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2和角加速度ε2的大小和方向。
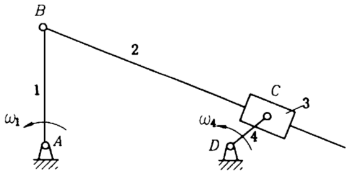
图(a)示机构中,已知机构尺寸lAB=50mm,lBC=100mm,lCD=20mm,角速度ω1=ω4=20rad/s。试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2及角加速度α2的大小和方向。(应列出矢量方程式,速度图和加速度图可画在试题纸上,参考比例尺:μv=20(mm/s)/mm,μα=400(mm/s2)/mm)

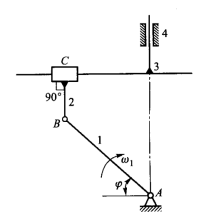
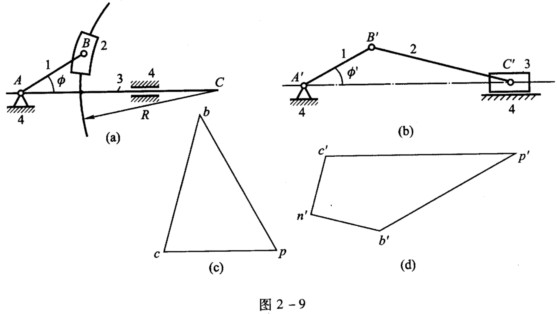
已知图2-9所示机构中,lAB=30 mm,R=30 mm,φ=30。,ω1=10 rad/s,试用相对运动图解法求构件3的速度v3和加速度a3。
已知图2-8所示导杆机构中lAB=30 mm,lBD=10 mm,lCE=10 mm,lDE=50 mm,ω3=10 rad/s。试用相对运动图解法求构件1的角速度ω1和角加速度α1。
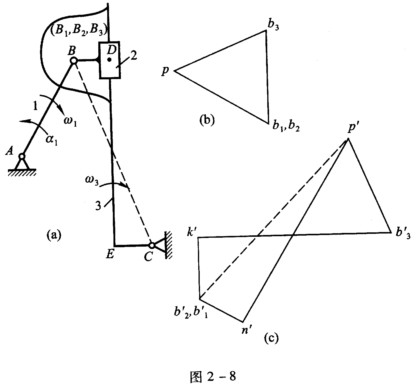
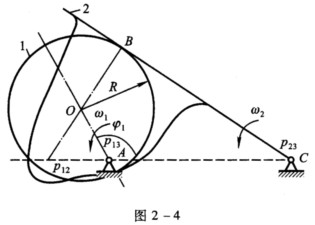
图2-4所示的凸轮机构中,若已知R=20 mm,lOA=15 mm,lAC=50 mm,φ1=120。,凸轮1以等角速度ω1=10 rad/s逆时针转动。试用相对运动图解法求从动杆2的角速度ω2。
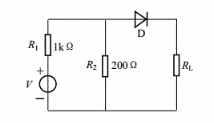
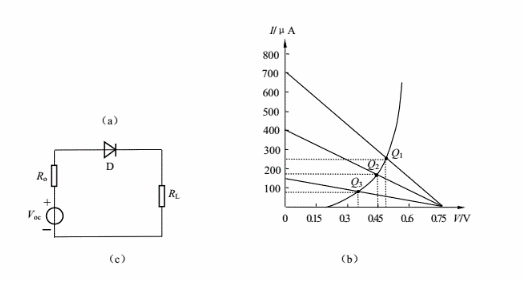
试用图解法求图(a)所示电路中二极管的VQ、IQ。设RL分别为1kΩ、2kΩ、5.1kΩ,二极管特性如图(b)所示。
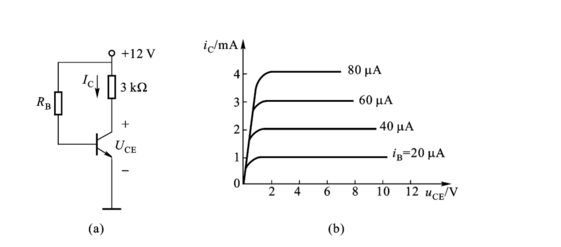
在图2.3(a)电路中,已知:UCC=24V,RB=800kΩ,RC=6kΩ, RL=3kΩ,三极管的输出特性曲线如图2.3(b)所示。试用图解法和估算法求静态工作点(IB,IC,UCE)。
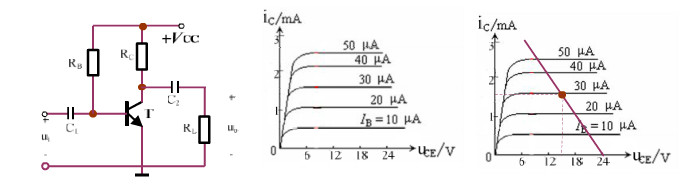
下图(a)所示电路中,三极管输出特性曲线如图P2.11(b)所示,令UBEQ=0,若RB分别为300kΩ、150kΩ,试用图解法求电路中IC、UCE。