题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
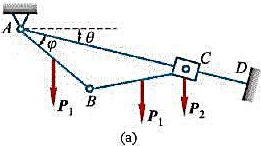
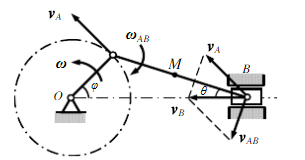
在图示机构中,曲柄AB和连杆BC长度相同,而且皆为重W1的均质杆,滑块C重为W2,它可沿倾角为θ的导杆AD滑动。求系
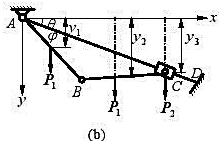
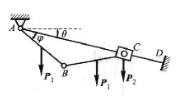
在图示机构中,曲柄AB和连杆BC长度相同,而且皆为重W1的均质杆,滑块C重为W2,它可沿倾角为θ的导杆AD滑动。求系统在铅垂面内平衡时的角φ。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图示机构中,曲柄AB和连杆BC长度相同,而且皆为重W1的均质杆,滑块C重为W2,它可沿倾角为θ的导杆AD滑动。求系统在铅垂面内平衡时的角φ。
如果结果不匹配,请 联系老师 获取答案
 更多“在图示机构中,曲柄AB和连杆BC长度相同,而且皆为重W1的均…”相关的问题
更多“在图示机构中,曲柄AB和连杆BC长度相同,而且皆为重W1的均…”相关的问题
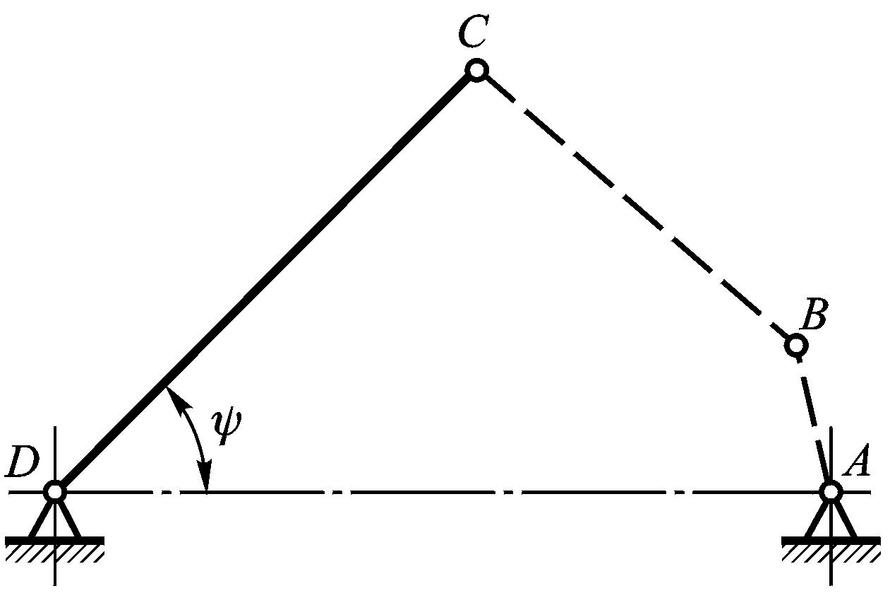
图示机构中,曲柄OA长r=0.2m,连杆AB长l=1.2m,摇杆O1B长l1=1m,连杆BC长l2=1m。在图示瞬时,曲柄的角速度ω0=10rad/s,角加速度α0=5rad/s2,OA及O1B恰在铅垂位置,
求(1)此时B点和C点的速度和加速度。
(2)当φ = 45。时连杆AB的角速度及其中点M的速度
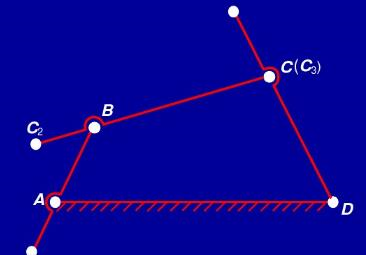
在图(a)所示的铰链四杆机构中,各构件长度lAB=100mm,lBC=400mm,lCD=200mm,曲柄AB的质量m1=10kg,连杆BC的质量m2=8kg,摇杆CD质量m3=4kg,欲使机构在机座上完全平衡。试问:
(1)整个机构重心与铰链中心A重合时,各活动构件的重心应处的位置;
(2)构件的重心位于各构件的中心,若使机构所有活动构件的质量的总重心S位于机架AD上任意点,应如何配置平衡质量。
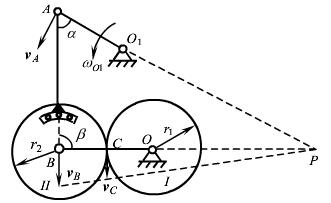
在图示瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB绕定轴O转动;在O轴上还装有齿轮Ⅰ.齿轮Ⅱ与连杆AB连为一体,并带动齿轮Ⅰ转动.已知r1=r2=0.3√3m,O1A=0.75m,AB=1.5m;又平衡杆的角速度ωO1=6rad/s.求当θ=60°和β=90°时.曲柄OB及齿轮Ⅰ的角速度。
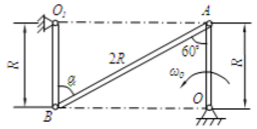
图示摆杆滑道机构的曲柄长OA=r,以匀转速n绕O轴转动。在图示位置时O1A=AB=2r,∠OAO1=θ,∠O1BC=φ。求杆BC的速度。

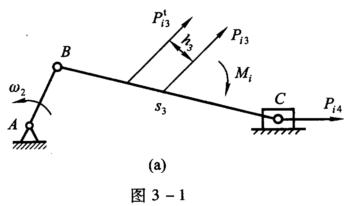
在图3-1a所示的曲柄滑块机构中,已知:曲柄和连杆的长度,连杆重心S3至曲柄销B的距离,滑块的质量m4,连杆的质量m3,连杆对通过其质心S3轴的转动惯量Js3。设曲柄以等角速度ω2逆时针回转。试求在图示位置时滑块和连杆的惯性力。
图示平面机构中,曲柄长OA=R,以匀角速度ω0绕O轴转动,连杆长AB=2R,BD绕O1轴转动,BO1=R,BD绕O1转动时,